软起动常用停机方式
自由停车 传统的控制方式都是通过瞬间停电完成的,即惯性停车(断电自停)。
软停车 如图(五)所示,在停车信号发出后,软起动器输出电压从额定电压Ue迅速降到跌落电压Usd,再按所设定的时间降到起始电压Ui,软起动器停止输出。 这种停车方式可以消除由于自由停车带来的拖动系统反惯性冲击,如皮带运输机、升降机等许多负荷并不宜突然停机,高层建筑的水泵系统也因自由停车,而产生巨大的“水锤”效应,使管道、水泵损坏。软停车功能正好能满足此要求。晶闸管在收到软停机信号后,导通角渐减,经一定时间才过渡到全关,即电动机端电压渐减至零,停车时间可按实际需要设定。
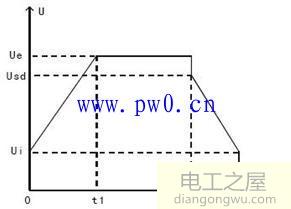
图(五)软停车示意图
制动停车 向电机输入直流电流,从而加快制动,制动时间可调,主要用于惯性力矩大的负载或需快速停机的场合,在一定的场合代替了反接制动停车。
接触器旁路工作
软起动器有在线型和旁路型。在线型是指起动完毕,不需要触器旁路,一直带电工作的工作方式,晶闸管长期在线运行功耗太大造成能源浪费、给电网带来高次谐波污染等。旁路型是为了延长使用寿命,使电网避免谐波污染,减少软起动器中的晶闸管发热损耗,在电动机达到满速运行时用旁路接触器取代已完成起动任务的软起动器。旁路型电路复杂化,系统可靠性降低。
软起动器的优点
对于大功率异步电动机而言,软起动比硬起动(即直接起动)和传统降压起动具有以下主要优点:
减少起动过程引起的电网电压降使之不影响同一供电网其它电气设备的正常运行;
对电动机提供平滑的起动过程,降低电机起动过程中线路的冲击电流,减少电动机(传动机械)的冲击电流及对电网和配电系统的冲击,延长电动机(传动机械)使用寿命;
减少电磁干扰:硬起动产生的冲击电流会以电磁波的形式干扰电气仪表的正常运行;
具有多台电动机控制功能,用一台起动器控制多台电动机的起动,起动电流、起动时间可分别设置;多种起动模式:电压斜坡起动、限流起动、脉冲突跳起动,具有软停车功能;
具有完善的保护功能:过载保护、断相保护、过压和欠压保护等。