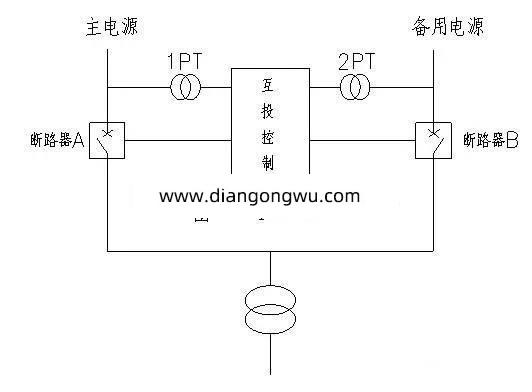
变电站巡检机器人的功能和存在问题探讨
机器人的种类
机器人一般用于常规AIS变电站,分为有轨和无轨两种。
有轨机器人需要在机器人道路上预先敷设磁条并安装RFID定位芯片,用于对机器人进行导航及定位,其前期工程量较大,同时磁条和RFID定位芯片的损坏将造成机器人无法正常执行任务。但在当前技术前提下,该类机器人在运行的稳定性和定位的准确性上优于无轨机器人。
无轨机器人导航无需磁条,而是依靠智能识别技术,因此在巡视路线的选择上局限性较小。但其精确性易受环境的影响,会造成机器人识别出错而使得巡检任务中断。但随着智能识别技术的发展,无轨机器人必然是今后的发展方向。

有轨机器人

无轨机器人
机器人的功能
目前,变电站机器人一般配备两类镜头:可见光镜头、红外镜头,用于实现可见光和红外照片的拍摄。相应地,机器人的功能主要体现在两个方面:可见光巡检和红外测温。
用户可以根据实际情况,基于机器人监控平台对机器人的功能进行拓展,依托于机器人实现更多功能,例如保护运行情况及压板状态监视、端子箱温湿度智能控制等。
可见光巡检
可见光巡检的内容主要包括:站内一次设备的外观、状态指示和表计读数。
(1)设备外观
充油类设备无渗漏油,套管瓷瓶无破损裂纹,引线接头无松动,端子箱、机构箱密封良好等。

电流互感器外观巡视

断路器外观巡视
(2)状态指示
状态指示主要是指开关、闸刀、接地闸刀分合位置,开关储能指示,以及主变呼吸器受潮变色情况等。

闸刀分合闸状态巡视

断路器储能状态巡视
(3)表计读数
表计读数主要包括避雷器泄漏电流、动作次数,充油类设备油位指示,变压器温度表读数,开关SF6压力表、液压机构压力表等。

避雷器泄露电流巡视

电流互感器油位巡视

主变油位巡视

断路器SF6压力巡视
红外测温
相信生产一线的运维人员对于红外测温并不陌生,对于常规AIS站来说,要对全站进行一次红外普测大约需要三四个小时。迎峰度夏期间,高温大负荷将使得设备发热情况加剧,因此除了需对全站设备进行普测外,还需要对重点设备和存在发热缺陷的设备进行跟踪测温。(https://www.dgzj.com/ 电工之家)此时,机器人的功能将得到全面体现。
红外测温的内容主要包括:设备本体、套管瓷瓶、导电臂、引流线、引线接头、末屏等易发热处。

闸刀发热巡视
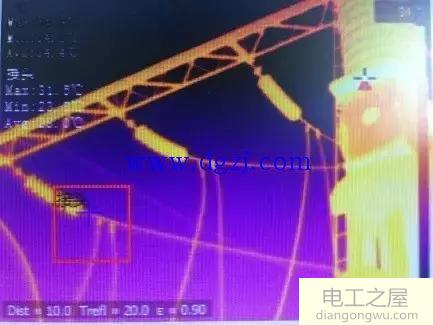
导线发热巡视
机器人存在的问题
虽然机器人有着诸多优点,但在目前科技水平下,机器人在运行过程中存在着较多问题,这也是各地市公司对机器人并不感冒的主要原因。机器人的问题主变体现在两个方面:技术标准和机器人技术。
技术标准
由于机器人目前还处于试运行阶段,电网公司对于机器人各方面的规章制度还不够完善,使得机器人在检测、验收及运维工作等方面缺乏指导,尤其是在机器人巡检点位的设置上缺乏明确的规定,对机器人的使用和推广带来一定阻碍。
2016年12月份,电网公司针对机器人出台了5个规范文件《变电站智能机器人巡检系统技术规范第1部分:变电站智能巡检机器人》、《变电站智能机器人巡检系统技术规范第2部分:监控系统》、《变电站智能机器人巡检系统检测规范》、《变电站智能机器人巡检系统验收规范》、《变电站智能机器人巡检系统运维规范》,从机器人本身、机器人监控系统、机器人检测、机器人验收和机器人运维等5个方面进行了规范。
其中《变电站智能机器人巡检系统运维规范》中对机器人巡检项目作了明确规定,对油浸式变压器、断路器、隔离开关等28类设备的巡视点位以及巡检项目进行了详细规定,为机器人巡检点位的设置提供了依据。
机器人技术
除了标准不够完善外,机器人技术是当前变电站机器人应用的重要阻碍。
(1)机器人本体
机器人属于精密仪器,长期运行于室外环境对其内部元件的寿命影响较大,尤其是可见光镜头、红外镜头、通信装置和电池等方面。
(2)点位识别
无论是有轨机器人还是无轨机器人,其在巡视过程中对点位的识别还需进一步提高。经过一段时间的运行后,机器人经常出现点位偏差的情况,无法正确定位需要拍摄的设备或仪表。因此,需要对机器人巡视点位进行定期维护,以确保机器人的正常运行,无形中加重了厂家及运维人员的工作量。
同时,无轨机器人巡视时的导航也靠智能识别技术,识别精度的选择也是目前的一个难点,过高过低都会影响机器人的正常运行。

点位识别错误

设备定位误差较大
(3)可见光识别
前面介绍过,机器人可见光巡检中包括表计读数,而实际运行中会发现,机器人表计读数的正确性很难保证,会大面积误报警。一方面与现场设备状态有关,例如表计玻璃脏污、互感器油位较难观测等;另一方面是机器人识别技术的不完善,无法对所拍摄照片中表计的读数进行准确识别。这就导致机器人的可见光巡检形同虚设,并没有减轻运维人员的工作量。

避雷器动作次数识别错误

断路器SF6压力误报警
(4)测温准确性
红外测温受多方面影响,镜头精度、对焦、距离和角度等都会影响所测设备温度。
虽然《变电站智能机器人巡检系统运维规范》中规定:对于主变等大型设备要求360°全覆盖,如主变本体,要求从正面、背面、左面和右面进行巡检,以确认主变无渗漏油、破损、锈蚀,测温正常;对于隔离开关等柱型设备,要求进行不少于2个方向的外观拍摄和红外测温,以确认无歪斜、破损、裂纹、渗漏油,测温正常。但机器人在距离和角度上无法做到连续调节,其测温往往低于设备实际温度,不利于运维人员对于设备发热程度的判断。目前的做法一般是机器人检测到设备发热后,由运维人员到现场进行实测核实,进而对发热情况进行定性。