以单台水泵的供水系统为例,假设水泵以调速方式运行,则其恒压控制原理框图如下:
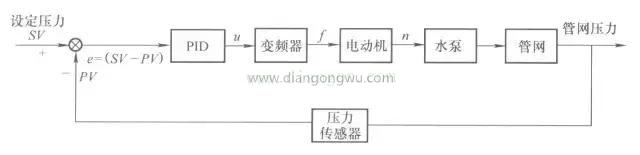
在图中,设定压力SV是工艺要求值,在PID上用按键输入此值,它是我们希望保持的管网压力值,管网上安装的压力传感器把实际压力PV输送到PID的检测量模拟输入端,PID比较误差e的正负。
当误差e为正时,说明实际压力值PV小于设定值SV,PID的输出u增大,变频器的输出增加,水泵转速n上升,实际压力值PV上升,当PV等于SV时,电动机转速停止上升,管网压力PV维持在设定值SV。
当误差e为负时,说明管网实际压力PV高于设定值SV,则PID输出u减小,变频器的输出频率f减小,水泵转速n降低,管网实际压力PV降低,当PV等于SV时,电动机转速停止降低,管网压力PV维持在SV。
如果积分参数I不起作用(I=0),则PID不能实现无差调节,因为PV=SV时,ei=0,则比例P和微分项D的输出为零,PID输出也将变为零,不能维持一定的压力值,因此必须有无差e才能使输出保持为一定的值,即u=P*ei。
所以PID控制器的I参数其主要作用是为了实现无差(ei=0)控制,用调速方式实现恒压控制如下图所示。
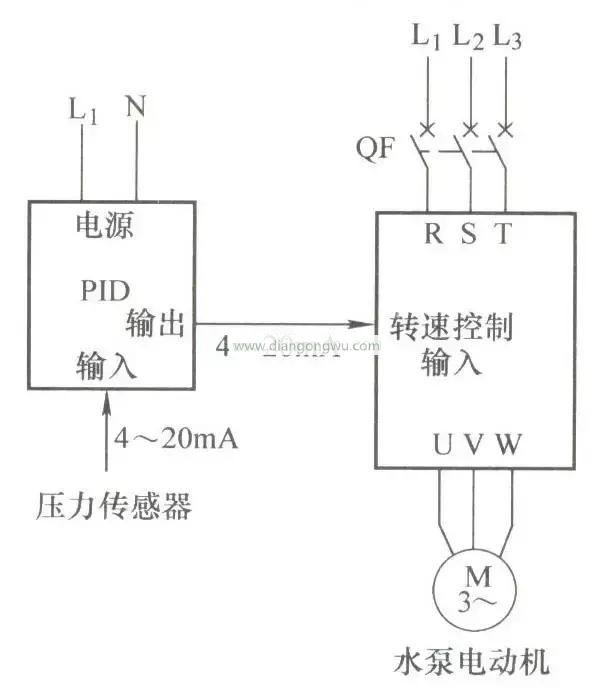
当管网压力用阀门调节来实现恒压控制时,用阀门调节实现恒压控制的原理如下图所示。
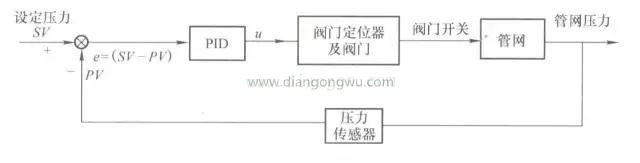
在图中,阀门定位器的作用是把PID输出的4~20mA信号转化为对应的阀门开度0~90°(全关~全开),其控制过程同第一张图。