继电器的种类及结构原理图解
继电器的种类很多,按输入量可分为电压继电器、电流继电器、时间继电器、速度继电器、压力继电器等;按工作原理可分为电磁式继电器、感应式继电器、电动式继电器、电子式继电器等;按用途可分为控制继电器、保护继电器等;按输入量变化形式可分为有无继电器和量度继电器。
有无继电器是根据输入量的有或无来动作的,无输入量时继电器不动作,有输入量时继电器动作,如中间继电器、通用继电器、时间继电器等。
量度继电器是根据输入量的变化来动作的,工作时其输入量是一直存在的,只有当输入量达到一定值时继电器才动作,如电流继电器、电压继电器、热继电器、速度继电器、压力继电器、液位继电器等。
一、 电磁式继电器
在控制电路中用的继电器大多数是电磁式继电器。电磁式继电器具有结构简单、价格低廉、使用维护方便、触点容量小(一般在5A以下)、触点数量多且无主、辅之分、无灭弧装置、体积小、动作迅速、准确、控制灵敏、可靠等特点,广泛地应用于低压控制系统中。常用的电磁式继电器有电流继电器、电压继电器、中间继电器以及各种小型通用继电器等。
电磁式继电器的结构和工作原理与接触器相似,主要由电磁机构和触点组成。电磁式继电器也有直流和交流两种。图1-11为直流电磁式继电器结构示意图,在线圈两端加上电压或通入电流,产生电磁力,当电磁力大于弹簧反力时,吸动衔铁使常开常闭接点动作;当线圈的电压或电流下降或消失时衔铁释放,接点复位。
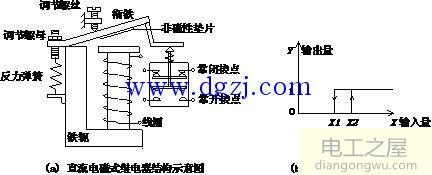
图1-11 直流电磁式继电器结构示意图
1、电磁式继电器的整定
继电器的吸动值和释放值可以根据保护要求在一定范围内调整,现以图1-11所示的直流电磁式继电器为例予以说明。
(1)转动调节螺母,调整反力弹簧的松紧程度可以调整动作电流(电压)。弹簧反力越大动作电流(电压)就越大,反之就越小。
(2)改变非磁性垫片的厚度。非磁性垫片越厚,衔铁吸合后磁路的气隙和磁阻就越 大,释放电流(电压)也就越大,反之越小,而吸引值不变。
(3)调节螺丝,可以改变初始气隙的大小。在反作用弹簧力和非磁性垫片厚度一定 时,初始气隙越大,吸引电流(电压)就越大,反之就越小,而释放值不变。
2、电磁式继电器的特性
继电器的主要特性是输入-输出特性,又称为继电特性,如图 1-11(b)所示。
当继电器输入量X由0增加至X2之前,输出量Y为0。当输入量增加到X2时,继电器吸合,输出量Y为1,表示继电器线圈得电,常开接点闭合,常闭接点断开。当输入量继续增大时,继电器动作状态不变。
当输出量Y为1的状态下,输入量X减小,当小于X2时Y值仍不变,当X再继续减小至小于X1时,继电器释放,输出量Y变为0,X再减小,Y值仍为0。
在继电特性曲线中,X2称为继电器吸合值,X1称为继电器释放值。k=X1/X2,称为继电器的返回系数,它是继电器的重要参数之一。
返回系数k值可以调节,不同场合对k值的要求不同。例如一般控制继电器要求k值低些,在0.1~0.4之间,这样继电器吸合后,输入量波动较大时不致引起误动作。保护继电器要求k值高些,一般在0.85~0.9之间。k值是反映吸力特性与反力特性配合紧密程度的一个参数,一般k值越大,继电器灵敏度越高,k值越小,灵敏度越低。
二、中间继电器
中间继电器是最常用的继电器之一,它的结构和接触器基本相同,如图1-12(a)所示,其图形符号如图1-12(b)所示。
中间继电器在控制电路中起逻辑变换和状态记忆的功能,以及用于扩展接点的容量和数量。另外,在控制电路中还可以调节各继电器、开关之间的动作时间,防止电路误动作的作用。中间继电器实质上是一种电压继电器,它是根据输入电压的有或无而动作的,一般触点对数多,触点容量额定电流为5A~10A左右。中间继电器体积小,动作灵敏度高,一般不用于直接控制电路的负荷,但当电路的负荷电流在5A~10A以下时,也可代替接触器起控制负荷的作用。中间继电器的工作原理和接触器一样,触点较多,一般为四常开和四常闭触点。
常用的中间继电器型号有JZ7、JZ14等。
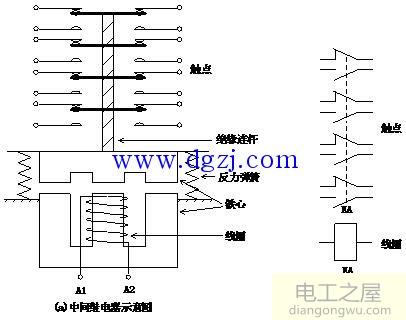
图1-12 中间继电器的结构示意图及图形符号
三、 电流继电器和电压继电器
1、电流继电器
电流继电器的输入量是电流,它是根据输入电流大小而动作的继电器。电流继电器的线圈串入电路中,以反映电路电流的变化,其线圈匝数少、导线粗、阻抗小。电流继电器可分为欠电流继电器和过电流继电器。
欠电流继电器用于欠电流保护或控制,如直流电动机励磁绕组的弱磁保护、电磁吸盘中的欠电流保护、绕线式异步电动机起动时电阻的切换控制等。欠电流继电器的动作电流整定范围为线圈额定电流的30%~65%。需要注意的是欠电流继电器在电路正常工作时,电流正常不欠电流时,欠电流继电器处于吸合动作状态,常开接点处于闭合状态,常闭接点处于断开状态;当电路出现不正常现象或故障现象导致电流下降或消失时,继电器中流过的电流小于释放电流而动作,所以欠电流继电器的动作电流为释放电流而不是吸合电流。
过电流继电器用于过电流保护或控制,如起重机电路中的过电流保护。过电流继电器在电路正常工作时流过正常工作电流,正常工作电流小于继电器所整定的动作电流,继电器不动作,当电流超过动作电流整定值时才动作。过电流继电器动作时其常开接点闭合,常闭接点断开。过电流继电器整定范围为(110%~400%)额定电流,其中交流过电流继电器为(110%~400%)IN,直流过电流继电器为(70%~300%)IN。
常用的电流继电器的型号有JL12、JL15等。
电流继电器作为保护电器时,其图形符号如图1-13所示。
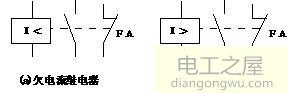
图1-13 电流继电器的图形符号
2、电压继电器
电压继电器的输入量是电路的电压大小,其根据输入电压大小而动作。与电流继电器类似,电压继电器也分为欠电压继电器和过电压继电器两种。过电压继电器动作电压范围为(105%~120%)UN;欠电压继电器吸合电压动作范围为(20%~50%)UN,释放电压调整范围为(7%~20%)UN;零电压继电器当电压降低至(5%~25%)UN时动作,它们分别起过压、欠压、零压保护。电压继电器工作时并联在电路中,因此线圈匝数多、导线细、阻抗大,反映电路中电压的变化,用于电路的电压保护。
电压继电器常用在电力系统继电保护中,在低压控制电路中使用较少。
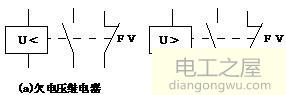
图1-14 电压继电器的图形符号
四、 时间继电器
时间继电器在控制电路中用于时间的控制。其种类很多,按其动作原理可分为电磁式、空气阻尼式、电动式和电子式等;按延时方式可分为通电延时型和断电延时型。下面以JS7型空气阻尼式时间继电器为例说明其工作原理。
空气阻尼式时间继电器是利用空气阻尼原理获得延时的,它由电磁机构、延时机构和触头系统3部分组成。电磁机构为直动式双E型铁心,触头系统借用LX5型微动开关,延时机构采用气囊式阻尼器。
空气阻尼式时间继电器可以做成通电延时型,也可改成断电延时型,电磁机构可以是直流的,也可以是交流的,如图1-15所示。
现以通电延时型时间继电器为例介绍其工作原理。
图1-15(a)中通电延时型时间继电器为线圈不得电时的情况,当线圈通电后,动铁心吸合,带动L型传动杆向右运动,使瞬动接点受压,其接点瞬时动作。活塞杆在塔形弹簧的作用下,带动橡皮膜向右移动,弱弹簧将橡皮膜压在活塞上,橡皮膜左方的空气不能进入气室,形成负压,只能通过进气孔进气,因此活塞杆只能缓慢地向右移动,其移动的速度和进气孔的大小有关(通过延时调节螺丝调节进气孔的大小可改变延时时间)。经过一定的延时后,活塞杆移动到右端,通过杠杆压动微动开关(通电延时接点),使其常闭触头断开,常开触头闭合,起到通电延时作用。
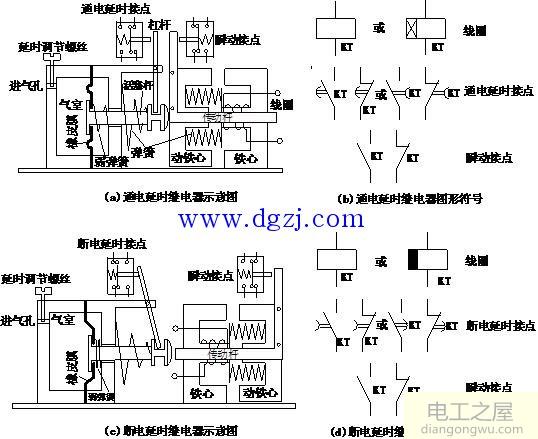
图1-15 空气阻尼式时间继电器示意图及图形符号
当线圈断电时,电磁吸力消失,动铁心在反力弹簧的作用下释放,并通过活塞杆将活塞推向左端,这时气室内中的空气通过橡皮膜和活塞杆之间的缝隙排掉,瞬动接点和延时接点迅速复位,无延时。
如果将通电延时型时间继电器的电磁机构反向安装,就可以改为断电延时型时间继电器,如图1-15(c)中断电延时型时间继电器所示。线圈不得电时,塔形弹簧将橡皮膜和活塞杆推向右侧,杠杆将延时接点压下(注意,原来通电延时的常开接点现在变成了断电延时的常闭接点了,原来通电延时的常闭接点现在变成了断电延时的常开接点),当线圈通电时,动铁心带动L型传动杆向左运动,使瞬动接点瞬时动作,同时推动活塞杆向左运动,如前所述,活塞杆向左运动不延时,延时接点瞬时动作。(https://www.dgzj.com/ 版权所有)线圈失电时动铁心在反力弹簧的作用下返回,瞬动接点瞬时动作,延时接点延时动作。
时间继电器线圈和延时接点的图形符号都有两种画法,线圈中的延时符号可以不画,接点中的延时符号可以画在左边也可以画在右边,但是圆弧的方向不能改变,如图1-15(b)和(d)所示。
空气阻尼式时间继电器的优点是结构简单、延时范围大、寿命长、价格低廉,且不受电源电压及频率波动的影响,其缺点是延时误差大、无调节刻度指示,一般适用延时精度要求不高的场合。常用的产品有JS7-A、JS23等系列,其中JS7-A系列的主要技术参数为延时范围,分0.4s~60s和0.4s~180s两种,操作频率为600次/h,触头容量为5A,延时误差为±15%。在使用空气阻尼式时间继电器时,应保持延时机构的清洁,防止因进气孔堵塞而失去延时作用。
时间继电器在选用时应根据控制要求选择其延时方式,根据延时范围和精度选择继电器的类型。
五、热继电器
热继电器主要是用于电气设备(主要是电动机)的过负荷保护。热继电器是一种利用电流热效应原理工作的电器,它具有与电动机容许过载特性相近的反时限动作特性,主要与接触器配合使用,用于对三相异步电动机的过负荷和断相保护。
三相异步电动机在实际运行中,常会遇到因电气或机械原因等引起的过电流(过载和断相)现象。如果过电流不严重,持续时间短,绕组不超过允许温升,这种过电流是允许的;如果过电流情况严重,持续时间较长,则会加快电动机绝缘老化,甚至烧毁电动机,因此,在电动机回路中应设置电动机保护装置。常用的电动机保护装置种类很多,使用最多、最普遍的是双金属片式热继电器。目前,双金属片式热继电器均为三相式,有带断相保护和不带断相保护两种。
1、热继电器的工作原理
图1-16(a)所示是双金属片式热继电器的结构示意图,图1-16(b)所示是其图形符号。由图可见,热继电器主要由双金属片、热元件、复位按钮、传动杆、拉簧、调节旋钮、复位螺丝、触点和接线端子等组成。
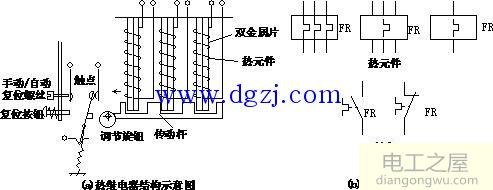
图1-16 热继电器结构示意图及图形符号
双金属片是一种将两种线膨胀系数不同的金属用机械辗压方法使之形成一体的金属片。膨胀系数大的(如铁镍铬合金、铜合金或高铝合金等)称为主动层,膨胀系数小的(如铁镍类合金)称为被动层。由于两种线膨胀系数不同的金属紧密地贴合在一起,当产生热效应时,使得双金属片向膨胀系数小的一侧弯曲,由弯曲产生的位移带动触头动作。
热元件一般由铜镍合金、镍铬铁合金或铁铬铝等合金电阻材料制成,其形状有圆丝、扁丝、片状和带材几种。热元件串接于电机的定子电路中,通过热元件的电流就是电动机的工作电流(大容量的热继电器装有速饱和互感器,热元件串接在其二次回路中)。当电动机正常运行时,其工作电流通过热元件产生的热量不足以使双金属片变形,热继电器不会动作。当电动机发生过电流且超过整定值时,双金属片的热量增大而发生弯曲,经过一定时间后,使触点动作,通过控制电路切断电动机的工作电源。同时,热元件也因失电而逐渐降温,经过一段时间的冷却,双金属片恢复到原来状态。
热继电器动作电流的调节是通过旋转调节旋钮来实现的。调节旋钮为一个偏心轮,旋转调节旋钮可以改变传动杆和动触点之间的传动距离,距离越长动作电流就越大,反之动作电流就越小。
热继电器复位方式有自动复位和手动复位两种,将复位螺丝旋入,使常开的静触点向动触点靠近,这样动触点在闭合时处于不稳定状态,在双金属片冷却后动触点也返回,为自动复位方式。如将复位螺丝旋出,触点不能自动复位,为手动复位置方式。在手动复位置方式下,需在双金属片恢复状时按下复位按钮才能使触点复位。
2、热继电器的选择原理
热继电器主要用于电动机的过载保护,使用中应考虑电动机的工作环境、起动情况、负载性质等因素,具体应按以下几个方面来选择:
(1)热继电器结构型式的选择:星形接法的电动机可选用两相或三相结构热继电器,三角形接法的电动机应选用带断相保护装置的三相结构热继电器。
(2)热继电器的动作电流整定值一般为电动机额定电流的1.05~1.1倍。
(3)对于重复短时工作的电动机(如起重机电动机),由于电动机不断重复升温,热继电器双金属片的温升跟不上电动机绕组的温升,电动机将得不到可靠的过载保护。因此,不宜选用双金属片热继电器,而应选用过电流继电器或能反映绕组实际温度的温度继电器来进行保护。
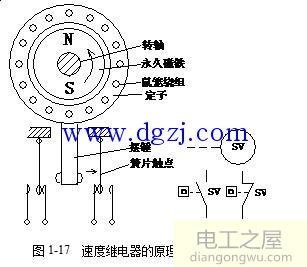
六、 速度继电器
速度继电器又称为反接制动继电器,主要用于三相鼠笼型异步电动机的反接制动控制。图1-17为速度继电器的原理示意图及图形符号,它主要由转子、定子和触头3部分组成。转子是一个圆柱形永久磁铁,定子是一个鼠笼型空心圆环,由硅钢片叠成,并装有鼠笼型绕组。其转子的轴与被控电动机的轴相连接,当电动机转动时,转子(圆柱形永久磁铁)随之转动产生一个旋转磁场,定子中的鼠笼型绕组切割磁力线而产生感应电流和磁场,两个磁场相互作用,使定子受力而跟随转动,当达到一定转速时,装在定子轴上的摆锤推动簧片触点运动,使常闭触点断开,常开触点闭合。当电动机转速低于某一数值时,定子产生的转矩减小,触点在簧片作用下复位。
常用的速度继电器有JYl型和JFZ0型两种。其中JYl型可在700~3600 r/min范围工作,JFZ0-1型适用于300~1000r/min,JFZ0-2型适用于1000~3000r/min。
一般速度继电器都具有两对转换触点,一对用于正转时动作,另一对用于反转时动作。触点额定电压为380V,额定电流为2A。通常速度继电器动作转速为130r/min,复位转速在100r/min以下。
七、液体继电器
液位继电器主要用于对液位的高低进行检测并发出开关量信号,以控制电磁阀、液泵等设备对液位的高低进行控制。液位继电器的种类很多,工作原理也不尽相同,下面介绍JYF-02型液位继电器。其结构示意图及图形符号如图1-18所示。浮筒置于液体内,浮筒的另一端为一根磁钢,靠近磁钢的液体外壁也装一根磁钢,并和动触点相连,当水位上升时,受浮力上浮而绕固定支点上浮,带动磁钢条向下,当内磁钢N极低于外磁钢N极时,由于液体壁内外两根磁钢同性相斥,壁外的磁钢受排斥力迅速上翘,带动触点迅速动作。同理,当液位下降,内磁钢N极高于外磁钢N极时,外磁钢受排斥力迅速下翘,带动触点迅速动作。液位高低的控制是由液位继电器安装的位置来决定的。
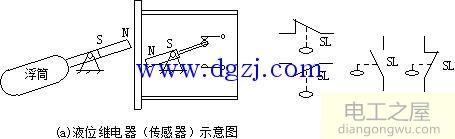
图1-18 JYF-02型液位继电器结构示意图及图形符号
八、 压力继电器
压力继电器主要用于对液体或气体压力的高低进行检测并发出开关量信号,以控制电磁阀、液泵等设备对压力的高低进行控制。图1-19为压力继电器结构示意图及图形符号。

图1-19 压力继电器结构示意图及图形符号
压力继电器主要由压力传送装置和微动开关等组成,液体或气体压力经压力入口推动橡皮膜和滑杆,克服弹簧反力向上运动,当压力达到给定压力时,触动微动开关,发出控制信号,旋转调压螺母可以改变给定压力。