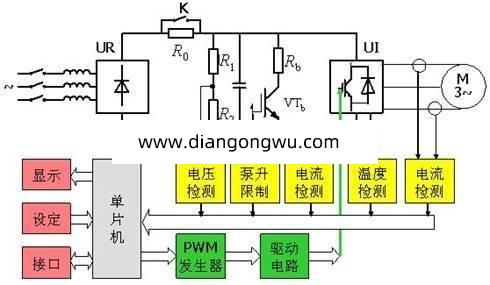
变频器内置PID控制电路如图所示。其作用如下,被控参数的检测值(反馈量)与目标值(设定值)进行比较,e=XT-XF不为0时,就存在偏差,则通过PID的控制动作,力求使偏差最小,故其与常规的控制方法是一样的。PID控制为广大仪表工所熟悉,对于控制器而言,它的输入信号是测量值X(或称为被控参数)与给定值X0的偏差e,习惯上,e=X-X0,并约定:e>0,称为正偏差;e<0,称为负偏差。
变频器内置PID控制电路原理放图
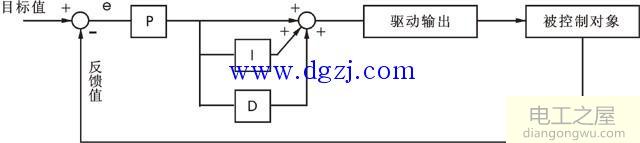
对大多数变频器而言,常将给定信号称为目标信号或目标值,用字母XT来表示,实际其等同于常规控制系统的给定值。其将被控参数称为反馈信号或当前值,用字母XF来表示,实际上其等同于常规控制系统的测量值。在变频器的说明书中将该信号的接入端子称为反馈输入端。这样变频器内置PID控制的输入信号是目标值XT与当前值XF的偏差XG,即XG=Kp (XT-XF ) ,式中XG为频率给定信号;Kp为比例增益。这跟常规控制系统的比例放大是一样的,即将(XT-XF)放大Kp倍作为频率给定信号。其如图2所示。显然,当放大器的比例增益Kp足够大时,反馈的动态特性决定了变频器内置PID控制装置的控制规律。较大的比例增益Kp可提高控制装置对小偏差的灵敏度(e=XT-XF),从而可提高频率控制的精度,即(XT-XF)的差值越小,XF越接近XT,但比例控制存在静态偏差,也是比例作用效果的根本特点,所以比例控制也叫有差控制。只是比例增益越大余差越小而已,不可能为零,但如果比例增益太大,系统过于灵敏,则会使变频器的输出频率大幅波动而产生振荡,这是不希望的。为了克服余差和避免系统振荡,所以就要使用积分控制。
积分控制的目的是消除余差,它通过对偏差的积分来校正变频器的输出频率,也就是过去的偏差进行累积来实现最终的零偏差;只要偏差不消除积分就不停止,从而有效消除了余差。积分增益的大小决定了多长时间对偏差积分一次,积分增益的倒数就称为积分时间S。
微分控制D,其作用与传统控制系统是一样的,主要是解决滞后问题。即其是根据偏差变化率的大小,提前给出一个相应的控制动作,以缩短控制动作时间,能较快调整变频器的输出频率。微分增益的大小决定了多长时间对偏差微分一次,大多变频器用的是微分时间SD,已有用微分增益KD的。由于微分控制属于敏感控制,有可能会对有用信号外的噪声响应,因此流量、压力控制都不使用微分控制。
变频器产品型号繁多,对于内置P1D控制的术语称谓不统一,由于变频器对PID参数的称谓与常规控制系统有所不同,这样就会造成使用者在理解和设定参数时无所适从,在理解变频器PID参数时可能会产生误解。因此,现将变频器说明书中对PID控制参数的称谓列举如下,供参考和比较。
比例(P)功能。有称为:PID输出增益、PID增益、比例常数(0-1000%)、比例增益(0.0-100)、比例P增益(0-999.9%)、比例值增益(0-5.0)等。
积分(I)功能。有称为:PID积分时间、积分时间常数(1.0-100.Os)、积分作用范围、积分时间常数、积分时间(0.1-3600ID.Os)、PID积分增益等。
微分(D)功能。有称为:PID微分时间、PID控制器微分时间、微分时间、微分时间常数、微分增益(0.0-5.0)等。
上述括号中的数字是部分变频器的数值设定范围例子,从中可见各型变频器的PID参数称谓是很不统一的,所以在设定PID参数前应阅读所使用变频器的说明书,按其说明进行设定。但只要掌握了PID各参数的作用,在实际的参数整定中,不管其如何标注还是有规律可循的,知道了各参数增大、减小的作用及方向,也就可进行参数整定工作了。