斗提机正反转设计的图纸实例
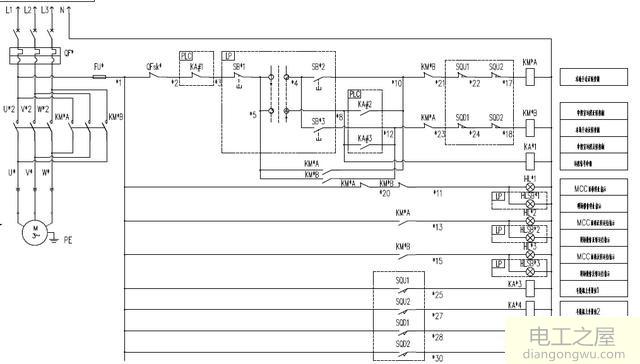
这个设计是一个斗提机的设计,正转为上升运行,反转为下降运行,另外上升运行有两个限位开关,到达指定上升位置则停止运行,下降运行有两个限位开关,到达指定下降位置则停止运行。
如图:
设计讲解:
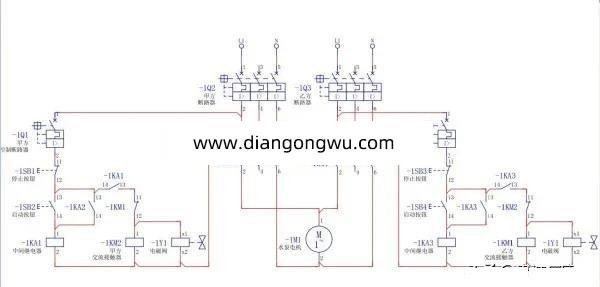
1,图纸左侧为主流路设计,由马达启动器和接触器组成,马达启动器是集成了断路器和热继电器的功能,为了压缩成本,没有选用常规配置的断路器+接触器+热继电器的套路。使用马达启动器和接触器组合,接线方便,元器件少,故障率自然就少了。两个接触器出线相同,KMB进线与KMA不同,KMB的三相进线A与B调换即可实现正反转。
2,图纸右侧是控制回路设计,由SB1停止按钮,SB2正转按钮,SB3停止按钮,HL1停止指示、HL2正转指示,HL3反转指示以及接触器线圈和继电器线圈组成。
其中需要注意的几点:(1)正反转线圈回路需要用KMA和KMB的常闭辅助触点互锁,互锁即为KMA吸合时KMB无法吸合,反之同理,KMB吸合时KMA无法吸合。(2)停止指示灯是利用KMA和KMB的常闭辅助触点串联,这样是当两个接触器都不吸合,即正反转都没有动作的情况下该指示灯(HL1)亮灯,代表停止状态;KMA和KMB任何一个接触器吸合时,该回路不同,则该指示灯(HL1)亮不灯,代表不在停止状态。而正转指示灯则利用KMA常开辅助触点,当KMA接触器吸合时,该回路接通,指示灯(HL2)亮灯,代表正转状态,反转指示灯同理更换为KMB常开辅助触点。(3)限位开关的常闭点分别串入KMA和KMB回路,当正转到位时SQU1和SQU2动作,常闭点变常开点,正转回路(KMA)断开,自动停止运行,反转同理。