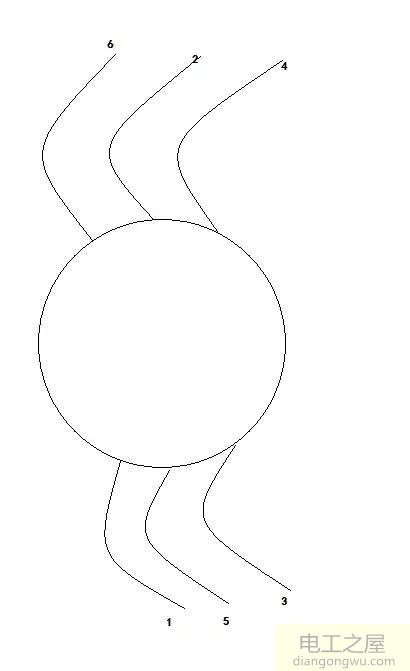
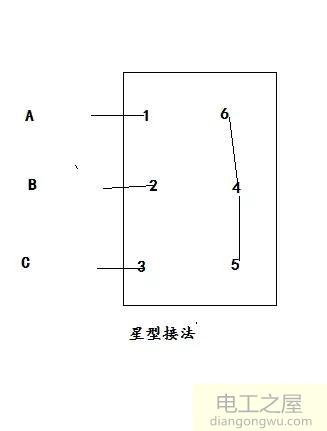
我们先把每个极相组设定一下,无论你的电动机是几极的,我们每组线圈都有一个“头”和“尾”,定义“头尾”就是按照电流的方向所有线圈的方向都一致。把所有的机相组串联后,最终剩下六条线,即每相都有一个“头”和“尾”。我们把第一项的头定义为数字1,把第二项的头定义为数字2、把第三项的头定义为3、把第一项的尾定义为4、把第二项的尾定义成5、把第三项的尾定义成6。为了保证相位差120度,我们把第二项头和尾的定义调换一下,如下图:
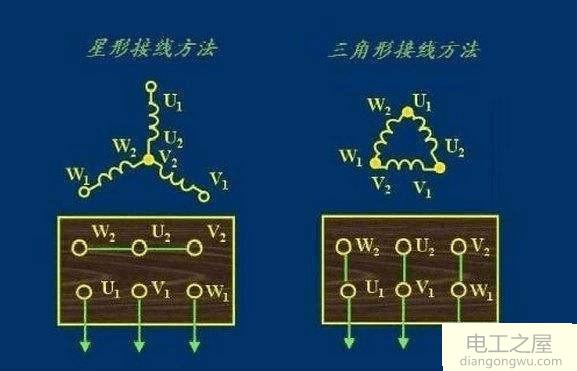
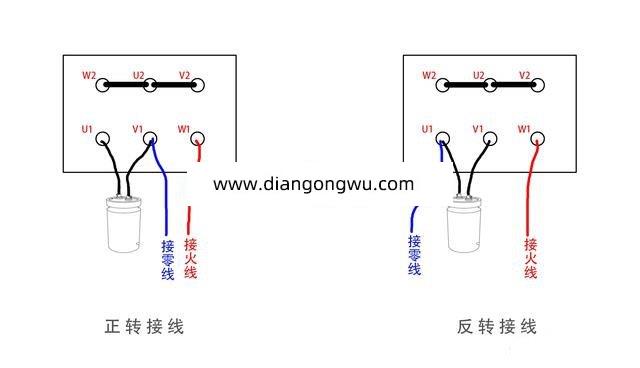
如果是低于3KW的电动机,我们可以把尾巴串联起来,接成星接,如果高于3KW的电动机我们要首位并联起来接成角接,角接的线序是1和6并联,即第一项的头和第三项的尾并联;2和4并联,即第二项的头和第一项的尾并联;3和5并联,即第三项的头和第二项的尾并联。三组分别接三相电,这就是角接。如果是电动机有6位的接线柱,如下图,按照这个定义接线后在用铜片相联即可,如下图:
用万用表测量三个机相组,直流电阻值是一样大的,在按照上述的方式找出头尾即可,三个头在电动机内部靠一边,三个尾在相对的位置靠一边,很容易找到。
最简单的就是用万用表的通断档位把六根线两两之间进行测量,通的说明是同一组绕组分别找出三组的头尾,同一字母的1和2为首尾,然后再进行定义上端为W2,U2,V2下端为U1,V1,W1,顺序按照下图参考即可