直流电机pwm调速原理方法
脉宽调制(PWM)调速技术已成为直流电机常用的调速方法,具有调速精度高、响应速度快、调速范围宽和功耗低等特点。而以H桥电路作为驱动器的功率驱动电路,可方便地实现直流电机的四象限运行,包括正转、正转制动、反转、反转制动,已广泛应用于现代直流电机伺服系统中。
众所周知,直流电动机转速公式为:
n=(U-IR)/Kφ
其中U为电枢端电压,I为电枢电流,R为电枢电路总电阻,φ为每极磁通量,K为环球电机结构参数。
直流电机转速控制可分为励磁控制法与电枢电压控制法。励磁控制法用得很少,大多数应用场合都使用电枢电压控制法。随着电力电子技术的进步,改变电枢电压可通过多种途径实现,其中脉冲宽度调制(PWM)便是常用的改变电枢电压的一种调速方法。其方法是通过改变东莞电机电枢电压接通时间与通电周期的比值(即占空比)来调整直流电机的电枢电压U,从而控制东莞电机速度。
PWM的核心部件是电压-脉宽变换器,其作用是根据控制指令信号对脉冲宽度进行调制,以便用宽度随指令变化的脉冲信号去控制大功率晶体管的导通时间,实现对电枢绕组两端电压的控制。
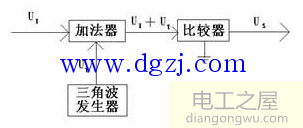
电压-脉宽变换器结构如图1所示,由三角波发生器、加法器和比较器组成。三角波发生器用于产生一定频率的三角波UT,该三角波经加法器与输入的指令信号UI相加,产生信号UI+UT,然后送入比较器。比较器是一个工作在开环状态下的运算放大器,具有极高的开环增益及限幅开关特性。两个输入端的信号差的微弱变化,会使比较器输出对应的开关信号。一般情况下,比较器负输入端接地,信号UI+UT从正端输入。当UI+UT>0时,比较器输出满幅度的正电平;当UI+UT<0时,比较器输出满幅度的负电平。
图一:电压—脉宽比较器
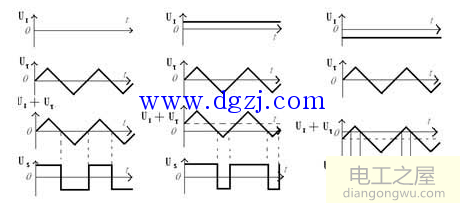
电压-脉宽变换器对信号波形的调制过程如图2所示。由于比较器的限幅特性,输出信号US的幅度不变,但脉冲宽度随UI的变化而变化,US的频率由三角波的频率所决定。
当指令信号UI=0时,输出信号US为正负脉冲宽度相等的矩形脉冲。
当UI>0时,US的正脉宽大于负脉宽。
当UI<0时,US的正脉宽小于负脉宽。
当UI≥UTPP/2时(UTPP是三角波的峰值),US为一正直流信号;当UI≤UTPP/2时,US为一负直流信号。
图二:PWM脉宽调制波形