l298n电机驱动模块pwn的实现
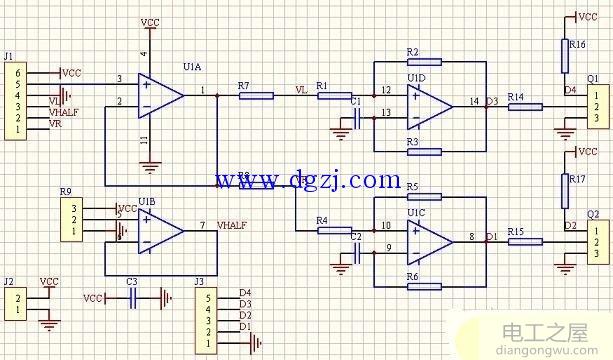
上图为一个使用游戏手柄或者航模摇杆上的线性电位器(或线性霍尔元件)控制两个底盘驱动电机的PWM生成电路。J1是手柄的插座,123和456分别是 x,y两个方向的电位器。U1B提供半电源电压,U1A是电压跟随。x,y分量经过合成成为控制左右轮两个电机转速的电压信号。在使用中,让L= (x+1)y/(x+1.4),R=(x-1)y/(x-0.6),经过试验有不错的效果(数字只是单位,不是电压值)。经过U1C和U1D组成的施密特振荡器把电压转换为相应的PWM信号,用来控制功率驱动电路。以U1D为例,R1,R2组成有回差的施密特电路,上下门限受输入电压影响,C1和R3组成延时回路,如此形成振荡的脉宽受输入电压控制。Q1,Q2是三极管,组成反相器,提供差分的控制信号。具体振荡过程参见对555振荡器的分析。