(一) 操作面板
iV5变频器的操作面板,LCD显示屏最多可显示32个数字和字母,并且可根据实际需要调节变频器和电动机的参数。
1.操作面板 (见图2-7-17)
2.操作面板的按键与LED显示功能说明
表2-7-9 显 示 功 能 说 明
| 项 目 | 名 称 | 功 能 | 说 明 |
| 按键 | MODE | 模式 | 移动到下一个参数组或第一个代码 |
| PROG | 编程 | 修改设定值 | |
| ENT | 确认 | 保存设定值 | |
| ▲ (Up) | 上 | 移动到下一个代码或增加设定值 | |
| ▼ (Down) | 下 | 返回到上一个代码或减少设定值 | |
| SHIFT/ESC | 移动/取消 | 在设定模式下移动光标或在其他模式下取消设置 |
续表
| 项 目 | 名 称 | 功 能 | 说 明 |
| 按键 | REV | 反转 | 反向运行 |
| STOP/RESET | 停止/复位 | 变频器运行时停止 变频器出现故障时复位 | |
| FWD | 正转 | 正向运行 | |
| LED | (REV) | 反转 | 表示电动机反向运行 当电动机反向运行加/减速时,灯闪亮。速度稳定时灯点亮 |
| (STOP/RESET) | 停止/复位 | 电动机停止时点亮 故障出现时灯闪亮 | |
| (FWD) | 正转 | 表示电动机正向运行 当电动机反向运行加/减速时,灯闪亮。速度稳定时灯点亮 |
3.操作面板的显示
(1) 初始显示 (见图2-7-18)。
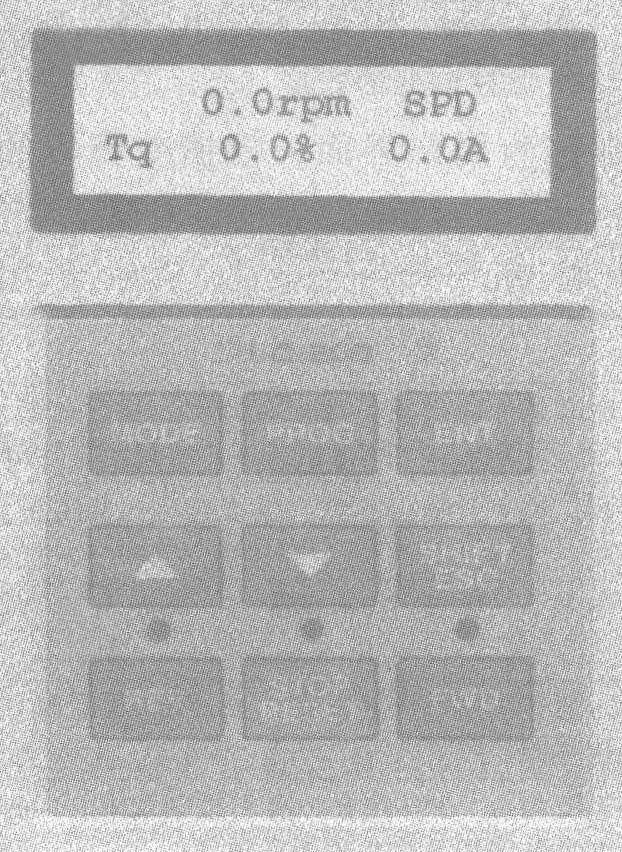
图2-7-17 iV5变频器操作面板
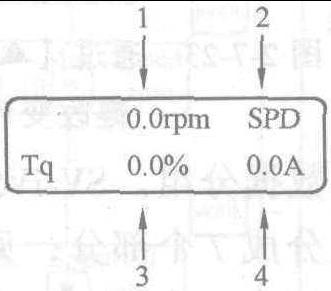
图2-7-18 操作面板的显示
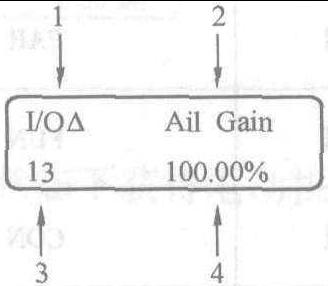
图2-7-19 参数显示
(2)参数显示 (见图2-7-19、表2-7-11)。
表2-7-10 参 数 说 明
| 序号 | 功 能 | 说 明 |
| 1 | 电动机速度 | 电动机的实际速度RPM(每 分钟的转速) |
| 2 | 电动机控制模式 | SPD: 速度控制模式 TRQ: 转矩控制模式 BX: 急停 |
| 3 | 转矩的百分比 | 电动机额定转矩的百分比 |
| 4 | 输出电流 | 变频器的输出电流RMS |
表2-7-11 参 数 显 示
| 序 号 | 功 能 | 说 明 |
| 1 | 参数组名称 | 显示每一个参数组的名称, 共有: DIS、I/O、PAR、FUN、 CON、USR和2nd参数组 |
| 2 | 代码名称 | 显示设置的代码名称 |
| 3 | 代码序号 | 显示设置的代码序号 |
| 4 | 代码数据和单位 | 显示设置的代码数据和单位 |
(3) 参数值的设定。变频器用键盘设置参数时,须根据负载情况和现场运行情况来设置参数,关于参数细节问题参考 “功能/参数” 说明。首先,把LCD显示切换到需要修改参数的代码画面。当按下 [PROG] 键后,光标闪亮,参数值的设置通过 (SHIFT/ESC)]、[▲(Up)] 和 [▼ (Down)] 设定,然后按下 [ENTER] 键确认。
注意: 在某些情况下,参数由于以下两个原因不能修改参数:
1) 某些参数在变频器运行过程中不能修改,请参阅 “功能/参数”。
2) 参数锁定功能被设置 (PAR-04 [Parameter Lock] 设置为有效)。
加减速时间从10s改变为15s,设置的步骤见图2-7-20~图2-7-24。
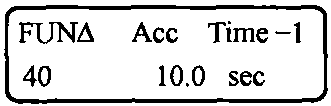
图2-7-20 移动到需要修改的代码
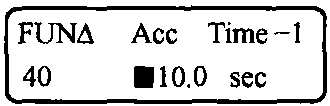
图2-7-21 按下 [PROG] 键设定模式 (光标出现并且闪亮)
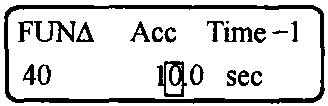
图2-7-22 通过 [SHIFT/ESC]移动光标到需要修改的点上
图2-7-23 通过 [▲(Up)]、[▼ (Down)]键改变和设定数据
图2-7-24 按下 [ENTER] 确认并保存改变的数据 (光标消失)
(4) 数据分组。SV-iV5系列变频器使用LCD作为用户界面,根据变频器的应用情况,把数据组分成7个部分,见表2-7-12。
表2-7-12 数 据 分 组 说 明
| 名 称 | LCD键盘 (左上角显示) | 数 据 分 组 |
| 显示组 | DIS | 电动机速度,电动机控制模式,转矩百分比,输出电流,用户选择显 示,PID输出/设定/反馈值,故障显示,用户组显示设定等 |
| I/O组 | I/O | 数字量输入参数,数字量输出参数,模拟量输入相关的参数,模拟量 输出相关的参数等 |
| 参数组 | PAR | 参数初始化,参数读/写/锁定/密码锁定,马达有关的额定参数,自 整定等 |
| 功能组 | FUN | 频率设定模式,运行模式,停止模式,加/减速时间和方式载波频率, 电子热保护功能选择等 |
| 控制组 | CON | 控制模式,ASR PI增益,PID增益,曳引控制设定,Droop控制相关参 数,转矩控制相关参数,V/F控制相关参数等 |
| 用户组 | USR | 强大的用户功能,功能保存,功能取消Ⅰ |
| 第二功能组 | 2nd | 第二电动机控制模式,第二电动机加/减速时间,第二电动机参数等 |
注 每组的详细介绍请参阅功能/参数说明。
要切换到另一个数据组,使用 [MODE] 键,在同一组内使用▲ (Up)、▼ (Down) 键进行上下移动,见图2-7-25。
(二) 电动机参数的设置
STARVERT-iV5系列变频器缺省电动机参数以LG Otis矢量电动机为标准。如果使用其他厂家电动机,在安装之前使用自整定功能调整电动机的参数,见表2-7-13。
(三) 自整定
在矢量控制获得一个良好的控制效果,参数诸如定子阻抗 (R),定子感抗 (L0),漏电流(Im) 和转子时间常数(τr)调整是必不可少的,设置使用自整定功能,这些参数将自动的进行调整到最佳值。自整定有两种类型,分别是旋转类型和停止类型。自整定旋转类型通过旋转电动机获得电动机参数调整,相反,自整定停止类型在电动机停止状态下获得电动机参数。
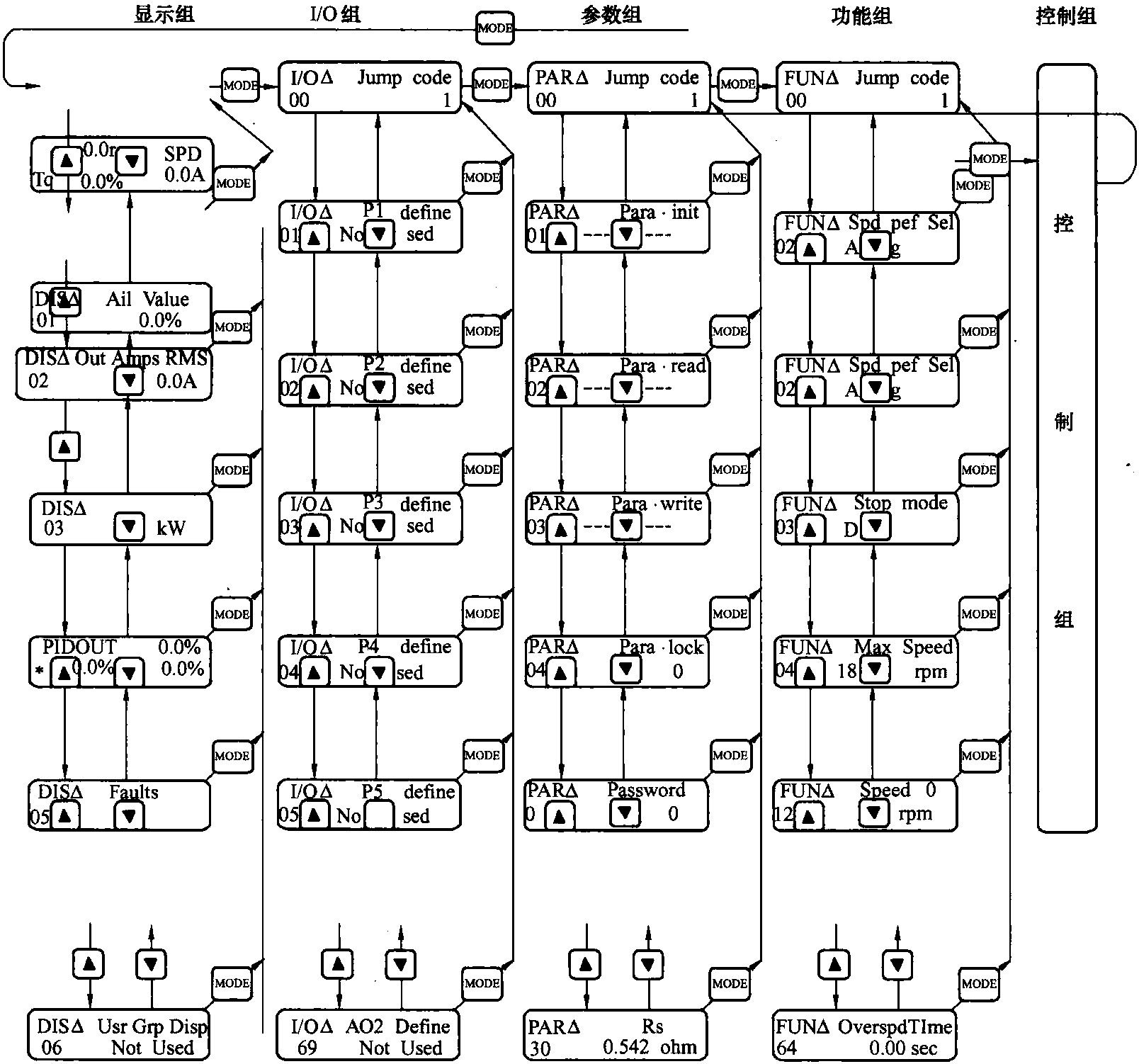
图2-7-25 数据组的切换界面
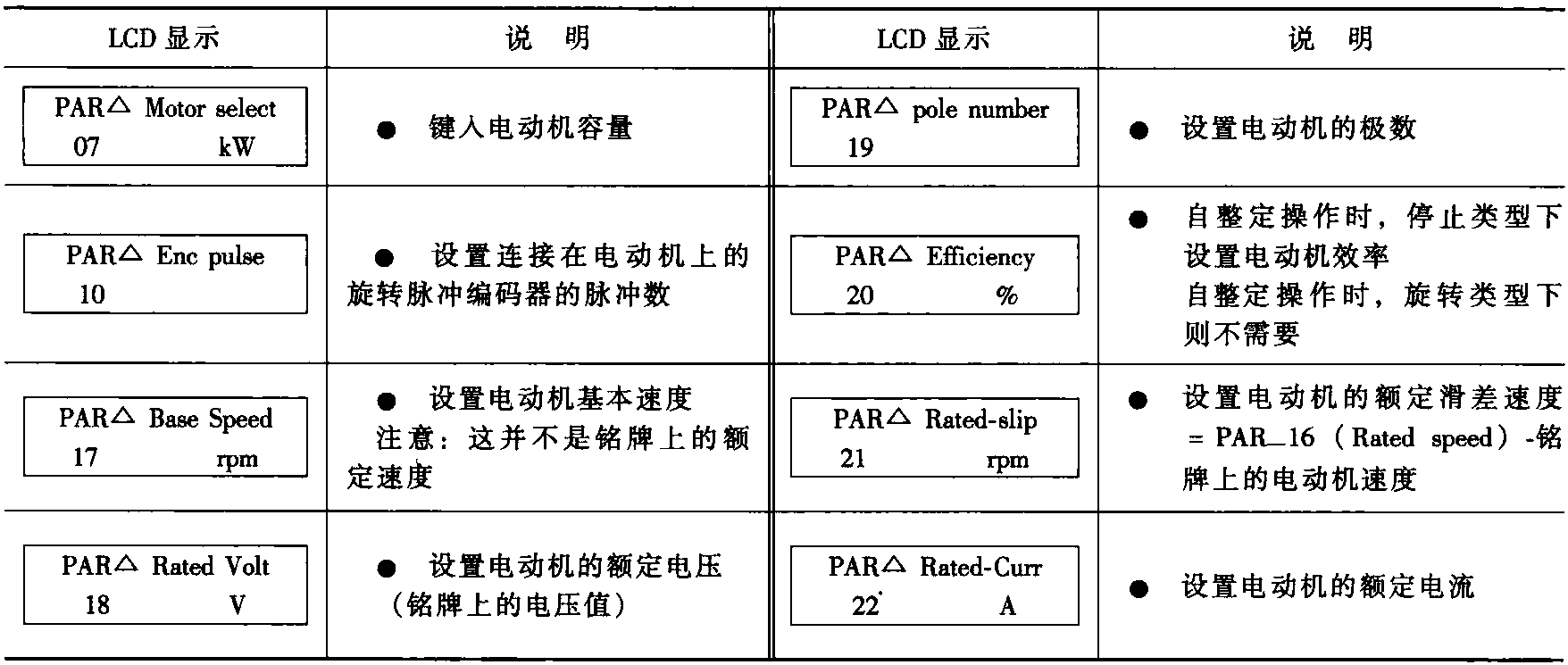
表2-7-13 电动机参数的设置
1. 自整定旋转类型
(1) 注意事项。将电动机和设备分离,使电动机处于无负载状态。
(2) 自整定工作程序,见表2-7-14。
表2-7-14 自整定工作程序
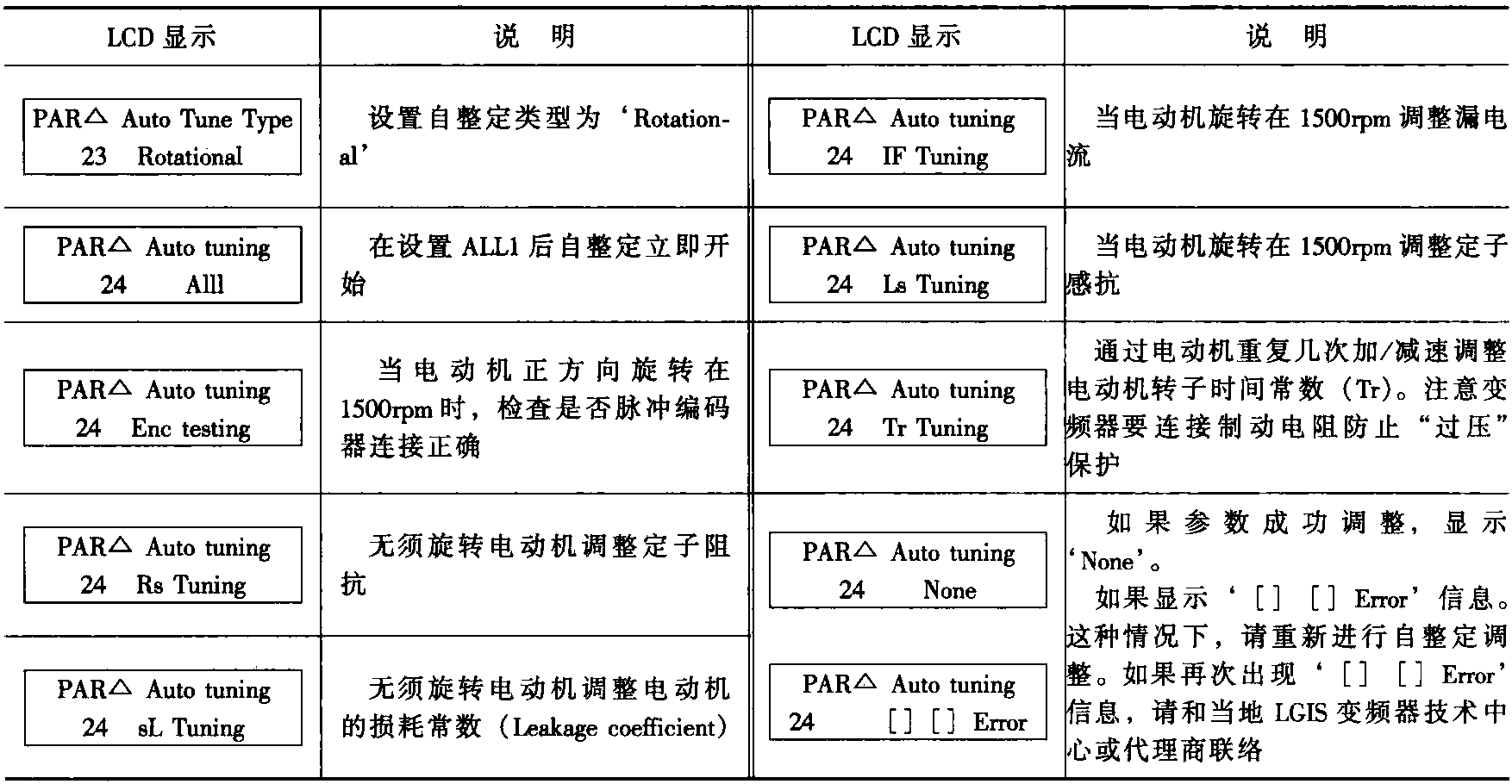
如果PAR_23 (Auto Tuning) 设置为ALL2,ALL2同ALL1一样,但是不能完成编码器检测。
每个参数可以单独进行整定。
(编码器检测,Rs整定,Lsigma,Flux Curr,Ls整定,Tr整定)
编码器 (A,B相) 或变频器输出 (U、V、W) 的配线改变的情况下,自整定操作期间显示 ‘Enc AB Chgd’ 信息。这种情况下,无须改变脉冲编码器配线,PAR-10 (Enc Dir Set)也会改变。(A Phase Lead→B Phase Lead,B Phase Lead→A Phase Lead)
2. 自整定停止类型
(1) 注意事项。将电动机和设备分离,使电动机处于无负载状态。
(2) 自整定工作程序,见表2-7-15。
表2-7-15 自整定工作程序
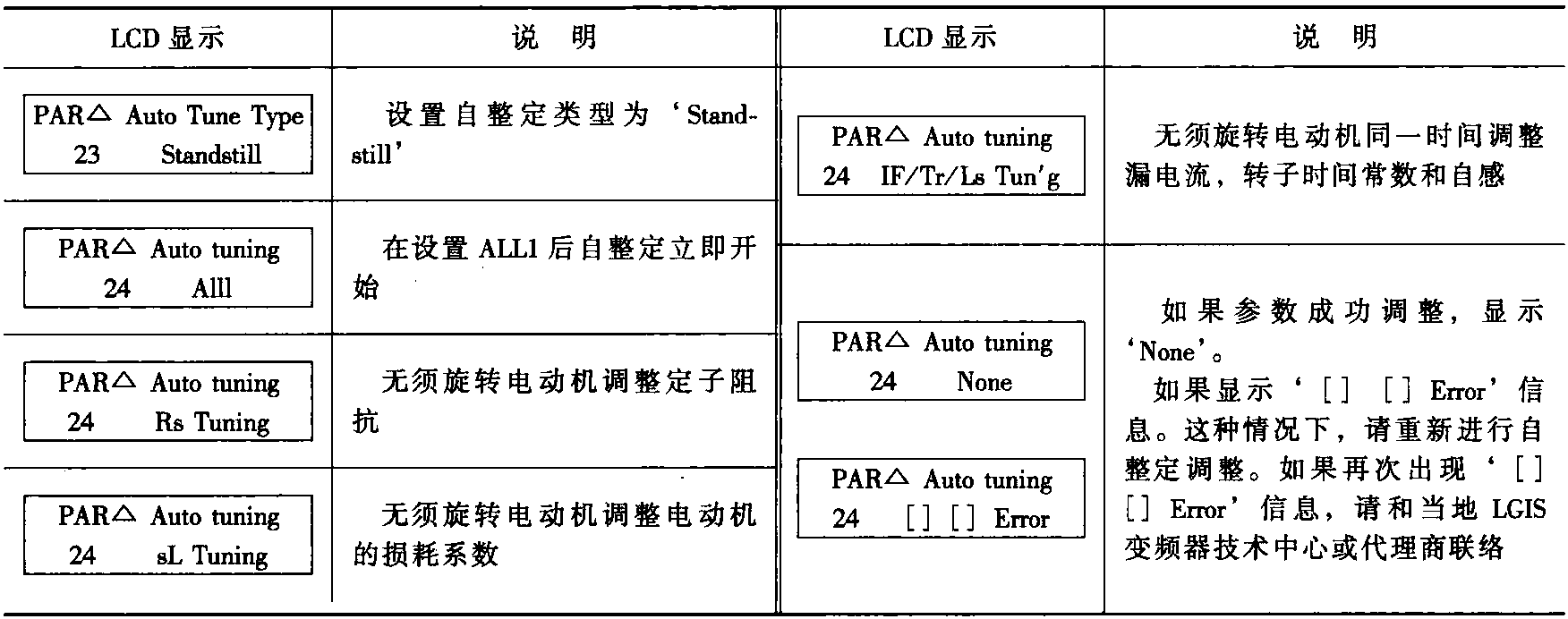
● 在自整定操作期间FWD/REV灯闪烁
● 每个参数可以被分别调整
(定子阻抗整定,漏磁通,If/Tr/Ls整定)
(四) 脉冲编码器检测
1.正方旋转的定义
面向电动机轴的方向,电机轴逆时针方向旋转为正方向旋转,如图2-7-26所示。
2.正方向旋转检测
当变频器上电后,电动机正方向旋转显示速度值为正值 (+),见图2-7-27。
3.反方向旋转检测
当变频器上电后,电动机反方向旋转显示速度值为负值 (-),见图2-7-28。

图2-7-26 电动机正方向旋转
如果速度值显示为0.0rpm或无法改变或速度值正负颠倒,检查脉冲编码器的配线是否正确。
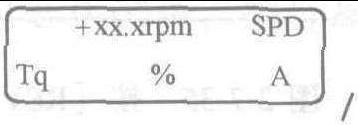
图2-7-27 正方向旋转
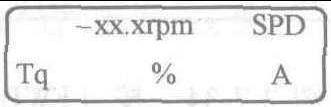
图2-7-28 反方向旋转
(五) 用面板键盘设置参数
1.键盘操作设置参数 (在100rpm操作)
(1) 通过键盘设置RUN/STOP指令,见图2-7-29。
(2) 通过键盘设置给定速度,见图2-7-30。
(3) 速度设置操作,见图2-7-31。

图2-7-29
图2-7-30
图2-7-31
2.正方向/反方向运行 (FWD/REV)
(1)按[FWD]键之后,通过LCD屏幕检查电动机启动速度是+100rpm,见图2-7-32。
(2)按[REV]键之后,通过LCD屏幕检查电动机启动速度是-100rpm,见图2-7-33。
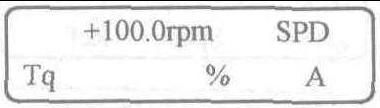
图2-7-32
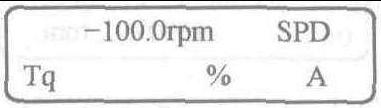
图2-7-33
3.表2-7-16描述的是由于编码器或电动机错误的配线导致不正常的运行
(1) 如果A相和B相颠倒,脉冲编码器配线检测之后记住要调换A相和B相。
(2) 如果电动机配线颠倒,电动机输出配线检测之后记住要调换V和W。
(3) 转矩显示是在无负载操作的基础上可以得到的。
4. 高速运行
表2-7-16 编码器或电动机错误的配线结果分析
| 指 令 | 旋转方向 | 速度显示 | 转矩显示 | 预计原因 |
| FWD | 正方向 | +100.0rpm | 低于+10% | 正常 |
| REV | 反方向 | -100.0rpm | 低于-10% | |
| FWD | 正方向 | -10~-40rpm | 150% | 编码器配线颠倒 |
| REV | 反方向 | 10~40rpm | -150% | |
| FWD | 反方向 | -10~-40rpm | 150% | V和W配线颠倒 |
| REV | 正方向 | 10~40rpm | -150% | |
| FWD | 反方向 | +100.0rpm | 低于+10% | 编码器和电动机 配线都颠倒 |
| REV | 正方向 | -100.0rpm | 低于-10% |
设置FUN_12为1000.0rpm并按 [FWD] 和 [REV]键检测速度显示是否正常。
(1) 按 [FWD] 见图2-7-34。
(2) 按 [REV] 见图2-7-35。
图2-7-34 按 [FWD]
图2-7-35 按 [REV]
(六) 用控制电路端子操作
1.控制电路端子操作必须设置的参数
(1) 控制电路端子的RUN/STOP指令见图2-7-36。
(2) 通过控制电路端子给定速度。
图2-7-36 控制电路端子的Run/Stop指令
图2-7-37 通过控制电路端子给定速度
(3) 设置最大的运行频率见图2-7-38。
(4) 定义Ai1 (模拟量输入端子) 见图2-7-39。
(5) 定义Ai1 (模拟量输入端子) 信号选择。(-10~10V,4~20mA,0~10V,20~4mA)
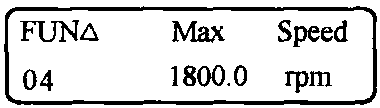
图2-7-38 设置最大的运行频率
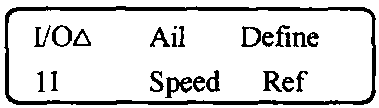
图2-7-39 模拟量输入端子
2.当使用滑动电阻 (电位器) 作为速度命令信号时配线
控制电路端子VREF、AI1、5G和滑动电阻的连接如图2-7-41所示。
3.增益和Bias整定
(1) 增益整定。
1) 在AI1和5G使用10V (当使用电位计时,旋转到最大时是最大电压)。
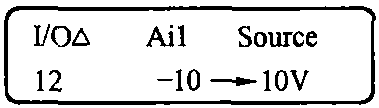
图2-7-40 AIL信号选择
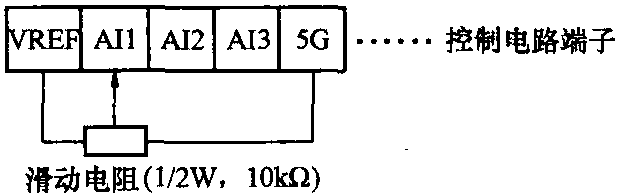
图2-7-41 控制电路端子VREF、AIL、5G和滑动电阻的连接
2) 移动到I/O_13 (AI1 Gain),按 [PROG] 键显示见图2-7-42。
3) 使用 [▲(Up)],[▼ (Down)]调整到AIL输入值显示为100.00%。
(2) Bias整定。
1) 在AIL和5G使用0V (当使用电位计时,旋转最小是最小电压)
2) 移动到I/O_14 (Ai1 Bias),按 [PROG] 键显示见图2-7-43。

图2-7-42 按 [PROG] 键显示

图2-7-43 按 [PROG] 键显示
3) 使用 [▲ (Up)]、[▼ (Down)] 调整到AI1输入值显示为0.00%。
4) 如果开始显示的是0.00%,按 [▲ (Up)] 键设置值为xx%,再次按 [▼ (Down)]键设置值为0.00%。
4.正方向/反方向运行 (FWD/REV Run)
(1) 正方向运行 (通过控制电路端子正方向运行)。
1) 在AI1和5G使用0V,当使用电位计时,旋转到最小时是最小电压;
2) 在控制电路端子上连接FX和CM之后检测LCD屏幕上最初显示是否是+0.0rpm;
3) 缓慢增加AI1电压值检测速度是否增加,使用电位计时,电阻值缓慢增加;
4) 断开FX和CM,电动机从运行到停止。
(2) 反方向运行 (通过控制电路端子反方向运行)。
1) 在AI1和5G使用0V,当使用电位计时,旋转到最小时是最小电压;
2) 在控制电路端子上连接RX和CM之后检测LCD屏幕上最初显示是否是-0.0rpm;
3) 缓慢增加Ai1电压值检测速度是否增加,使用电位计时,电阻值缓慢增加;
4) 断开RX和CM,电动机从运行到停止。
5.由于错误的导线端子配置,或脉冲编码的错误,可能会导致不正常的运行
(1) 如果A相和B相颠倒,脉冲编码器配线检测之后记住要调换A相和B相。
(2) 如果电动机配线颠倒,电动机输出配线检测之后记住要调换V和W。
表2-7-17 指 令 含 义
| 指 令 | 旋转方向 | 速度显示 | 转矩显示 | 预计原因 |
| FWD | 正方向 | +100.0rpm | 低于+10% | 正常 |
| REV | 反方向 | -100.0rpm | 低于-10% | |
| FWD | 正方向 | -10~-40rpm | 150% | 编码器配线颠倒 |
| REV | 反方向 | 10~40rpm | -150% | |
| FWD | 反方向 | -10~-40rpm | -150% | V和W配线颠倒 |
| REV | 正方向 | 10~40rpm | -150% | |
| FWD | 反方向 | +100.0rpm | 低于+10% | 编码器和电动机 配线都颠倒 |
| REV | 正方向 | -100.0rpm | 低于-10% |
(3) 转矩显示是在无负载操作的基础上可以得到的。