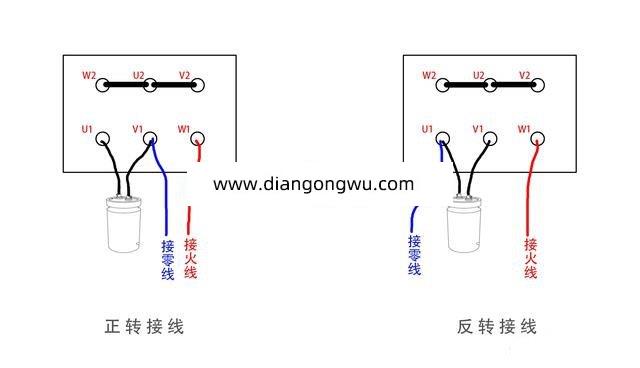
QB-R2绕线电动机调速控制器的功率元件(三相反并联晶闸管) 串联于电动机定子回路,而与电动机功率相匹配的电阻器串接于电动机转子回路中。控制电路通过改变晶闸管的导通角来改变电动机定子电压,从而达到控制电动机转速的目的。
1.起升
当用主令控制器选择起升速度挡位的某一挡时,调速控制器首先接通上升接触器,然后制动器打开,电动机开始起动,通过转子频率反馈和主令控制器的速度设定,系统进入闭环控制状态。主令控制器如选择全速挡,则电动机平稳加速至全速;如从全速挡退回慢速挡,则电动机转速迅速降低,自动进入闭环控制状态而稳定在所设定的速度上。不论在何种上升速度,只要主令控制器回到零位,制动器立即制动,然后电动机断电。
2.重载下降
当主令控制器选择下降速度挡位的某一挡时,调速控制器首先接通上升接触器,然后制动器打开,此时给电动机提供的是反接力矩,调速控制器进入闭环控制状态。当主令控制器为全速下降挡时,下降接触器接通,电动机转速全速下降。若从全速挡回到慢速挡,则下降接触器释放,上升接触器接通,在反接力矩作用下,电动机迅速减速,重新进入闭环控制状态。不管在何种下降速度,一旦主令控制器回到零位时,控制器以反接力矩进行制动,电动机速度迅速减少,达到静止状态后,制动器制动,随后电动机电源被切断。如果反接力矩制动时间超过1s,不管电动机是否达到静止状态,制动器强制制动。
3.轻载下降
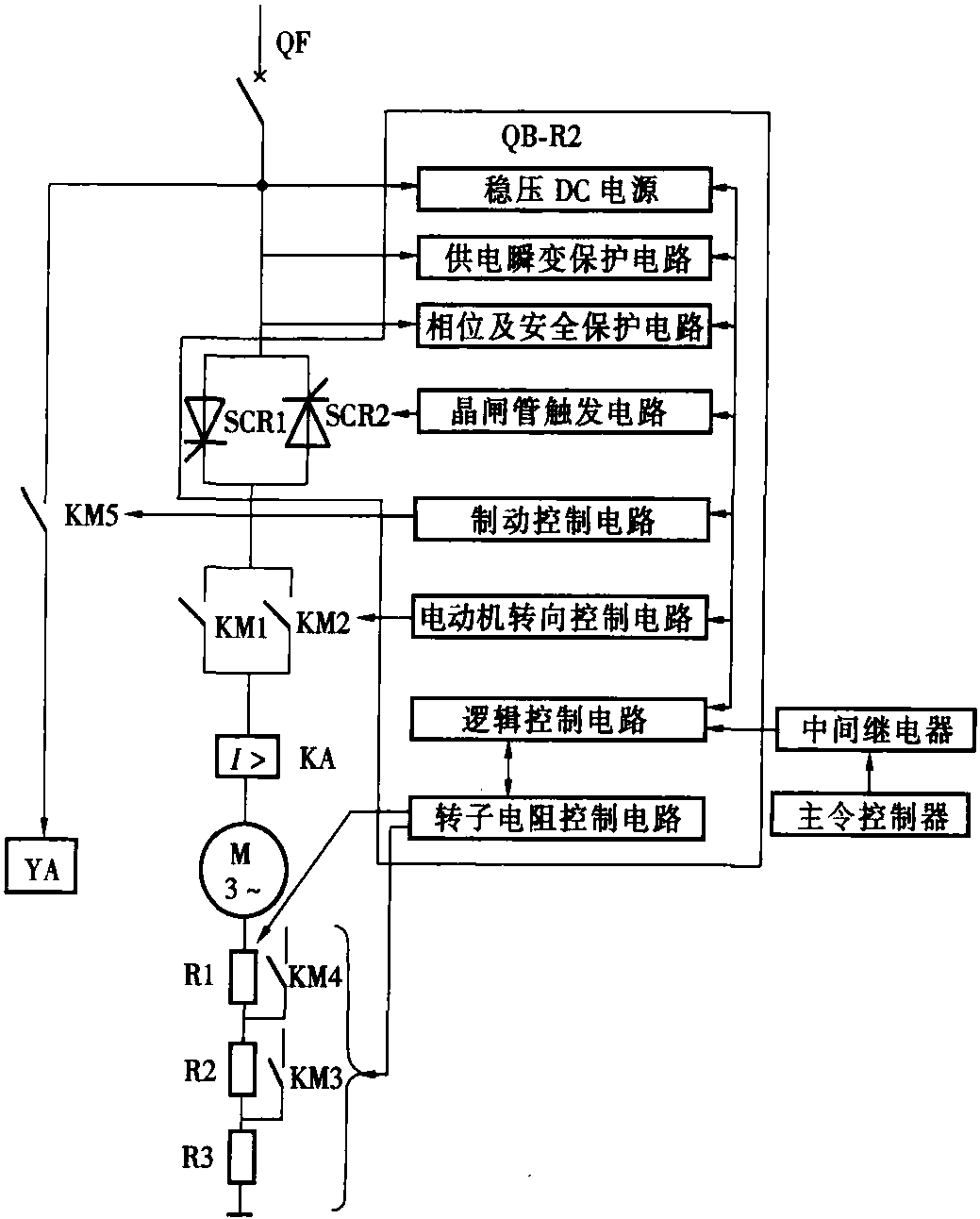
图2-10-1 QB-R2绕线电动机调速控制器方框图
QF—断路器;KM1—起升接触器;KM2—下降接触器;KM3、4—转子接触器; KM5—制动器接触器;KA—过载保护;QB—R2—调速控制器;
SCR1、2—晶闸管;M—绕线电动机;YA—制动器; R1、2、3—转子电阻
轻载下降与重载下降一样,调速控制器首先接通上升接触器,给电动机施加一定的反接力矩,如果负载极轻(如空钩),调速控制器就会判定负载过轻,使上升接触器释放,下降接触器接通,此时电动机将以再生发电状态下降。当速度超过设定值时,调速控制器自动转为反接力矩状态。
4.平移
当主令控制器在左移位置时,调速控制器接通左移接触器,车体以主令控制器所设的速度向左运行; 主令控制器在右移位置,右移接触器接通,车体以主令控制器所设的速度向右运行。当主令控制器在某一速度挡时,调速控制器在闭环控制下按该挡速度运行。当受到某种阻力 (如桥架倾斜),控制器在闭环控制下仍然维持该挡速度,若阻力消失,平移机构将被加速; 当超过设定速度的10%时,反向接触器接通,电动机开始减速。由于此时反接力矩不超过满载起动力矩,所以电动机逐渐减速达到所要求的速度,若此时平移机构受到前推力,则反接力矩用以保持速度,若前推力消失,反向接触器被释放,正向接触器接通,平移机构正常运行。电动机速度必须高于设定速度的10%以上才能产生反接,因此主令控制器从30%到20%或从20%到10%的设定速度,不会触发反向接触器。
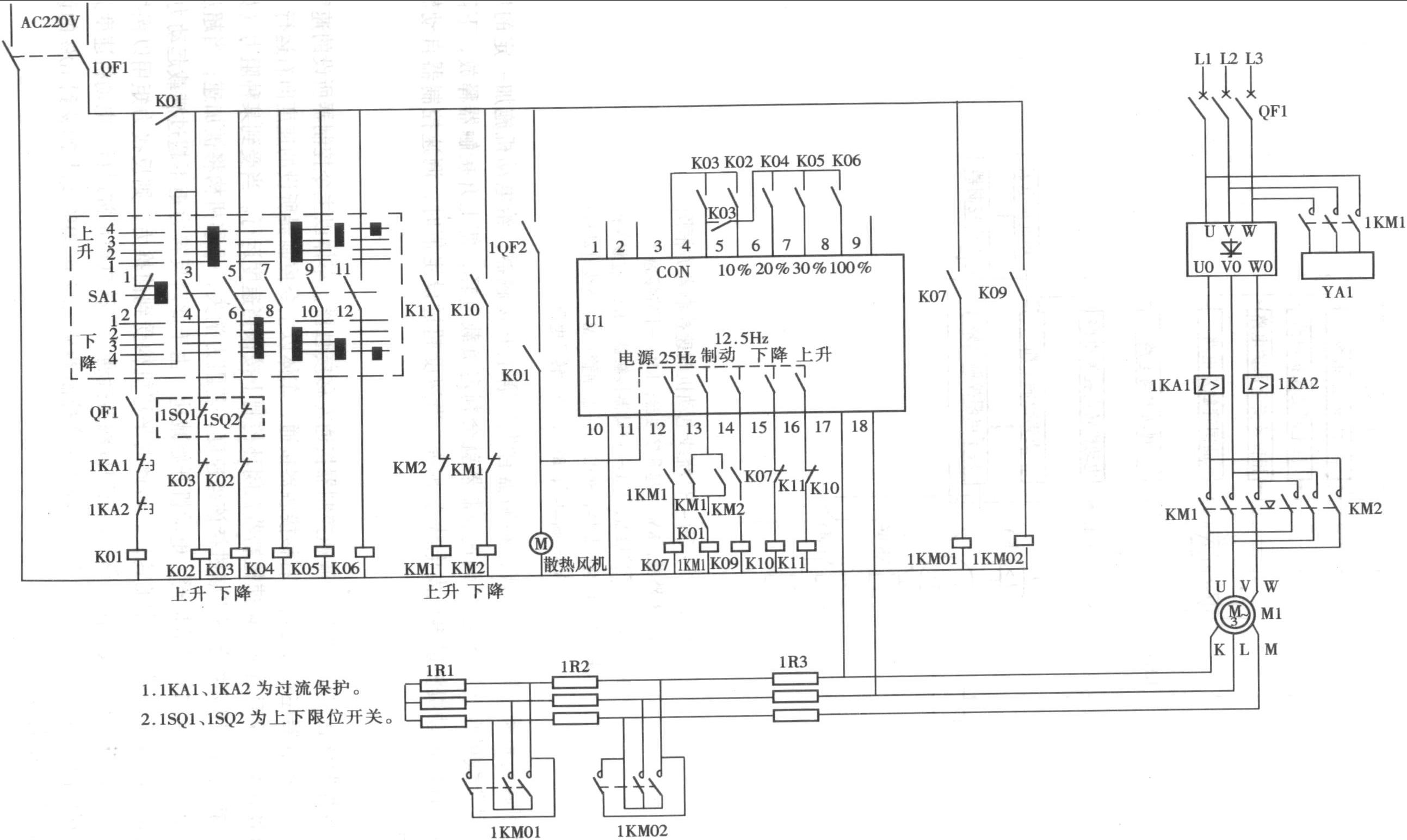
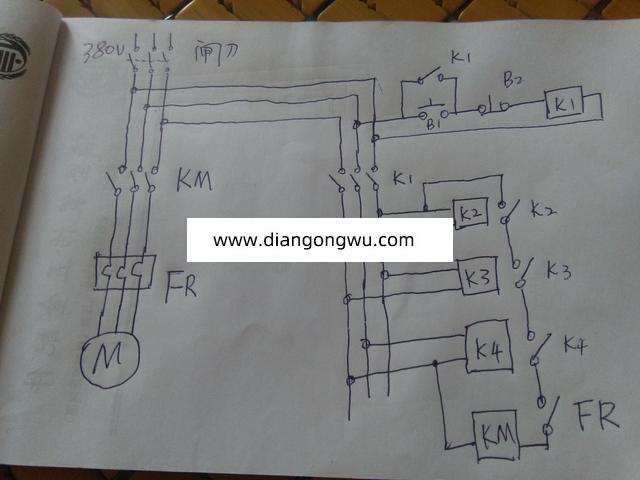
图2-10-2 升降机构原理图
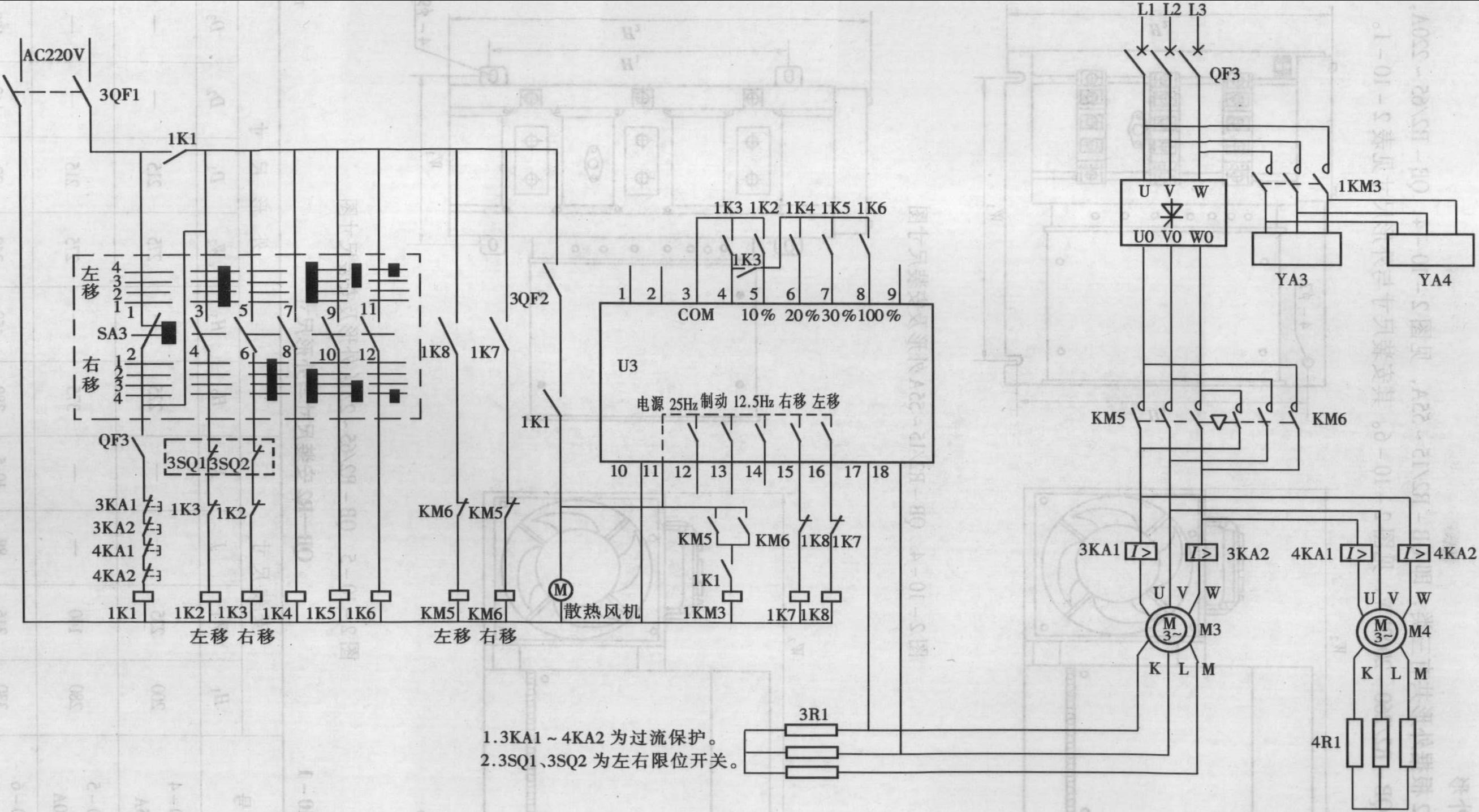
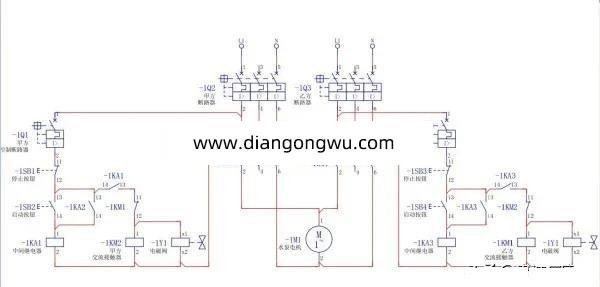
图2-10-3 平移机构原理图