龙门刨床和立式车床等的横梁在正常情况下是夹紧在立柱上的,只有要移动横梁时才将横梁从立柱上松开,当移动到需要的位置后,再将横梁夹紧在立柱上。横梁放松、夹紧有采用电动机驱动的,也有采用 液压及压缩空气等方式驱动的。如果用电动机驱动,需要两台电动机,一台用于配合夹紧装置实现横梁夹紧与放松,再由另一台电动机来完成横梁的上下移动。横梁移动对控制的要求如下:
(1)横梁移动只有在工作台停止工作时才允许运行。可以通过在控制放松的接触器线圈电路中串联控制工作台的接触器动断触点来实现。
(2)横梁上升或下降的操作应为点动控制,以保证调整的准确性。
(3)横梁上升或下降信号发出后,应自动完成横梁放松→移动→自动夹紧的过程。
(4)横梁升降应有上下极限保护。
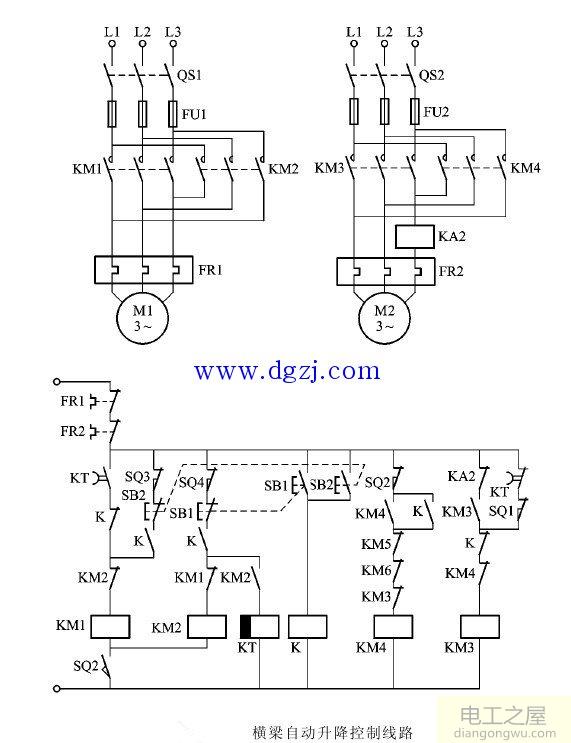
如图所示为横梁自动控制线路。KM1、KM2分别为上升、下降接触器,KM3、KM4分别为夹紧与放松接触器,K为中间继电器,KA2为过电流继电器,SQ1、SQ2分别为夹紧与放松限位开关,SQ3、SQ4为横梁升降极 限开关,KM5、KM6的动断触点为工作台与横梁机构的联锁触点,当工作台运动时,KM5或KM6动断触点断开,KM4线圈不能通电,确保只有在工作台停止时才允许横梁移动。
线路的工作过程如下:
横梁上升时,按下起动按钮SB1,中间继电器K通电,其动合触点闭合使KM4线圈通电并自锁,KM4的主触点闭合,使横梁夹紧电动机反转,横梁逐渐放松,当横梁放松到位时压下限位开关SQ2, SQ2的动断触点断开使KM4线圈断电,横梁夹紧电动机断电,放松动作完成。同时,SQ2的动合触点闭合使KM1线圈通电动作,主触点闭合,横梁升降电动机起动正转,拖动横梁上升。
当横梁上升到位时,松开按钮SB1,中间继电器K线圈断电,KM1线圈断电,横梁升降电动机脱离电源停止运转。此时横梁虽然己不再运动了,但横梁仍处于放松状态,即限位开关SQ2仍处于被压下状态,其动合 触点仍然闭合。由于K线圈断电使其动断触点闭合,KM3线圈通电动作并自锁,对KM3线圈进行两路供电,横 梁夹紧电动机正转,拖动夹紧机构将横梁夹紧,SQ2复位,为下次横梁上升做好准备。当夹紧到一定程度时 ,压下限位开关SQ1,其动断触点断开,但KM3通过另一路供电(即通过KA2的动断触点与KM3动合触点供电) ,电动机继续旋转,横梁继续夹紧。随着夹紧力的增大,夹紧电动机定子电流增大,当达到KA2的吸合值时 ,KA2动作,动断触点断开,KM3线圈断电,横梁夹紧电动机断开电源停止运转,横梁夹紧自动完成,横梁上升过程结束。
夹紧过程分两个阶段进行,第一阶段是行程控制,由行程开关SQ1进行位置检测;第二阶段是以电流为变化参量进行控制,调整过流继电器KA2的动作值,就间接地调整了夹紧力的大小。
横梁下降时,其动作次序与上升基木相同,只是在横梁下降到位时,为了消除丝杠与螺母的间隙,要求横梁稍微回升一下,在图中采用断电延时型时间继电器KT作回升控制。按下按钮SB2时,工作过程为首先是横梁放松,然后是横梁下降,同时时间继电器KT线圈通电,其动合延时打开的触点瞬时闭合。当下降到预定位置时,松开SB2, K线圈断电,其动合触点断开使KM2线圈断电,一方面由于KM2的动断触点闭合使KM1线圈通电,电动机正转带动横梁回升:另一方面KM2的动合触点断开,KT线圈断电开始延时,当到达预先整定的时间后,其动合延时打开的触点断开使KM1线圈断电,电动机停止上升,同时时间继电器的动断延时闭合触点KT闭合使KM3线圈通电带动夹紧机构进行夹紧,到达位置时,限位开关SQ1被压下,SQ1的动断触点断开,达到电流继电器KA2的动作电流时,KA2动断触点断开,KM3线圈断电,夹紧电动机断电,停止转动,下降过程结束。
由以上的分析可以看出,找出反映过程的变化参量,并检测出来作为控制信号,就可以实现对生产过程的自动控制。