今天小编要和大家分享的是三电平,有源滤波器,滤波器相关信息,接下来我将从三电平apf有源滤波器的设计研究,中点钳位式三电平有源电力滤波器快速模型预测控制方法与流程这几个方面来介绍。

中点钳位式三电平有源电力滤波器快速模型预测控制方法与流程
三电平拓扑结构相对于两电平在性能上有很多优势,但是也存在中点电位不平衡这一固有问题。 基于简化的三电平空间矢量脉宽调制(space vector pulse width modulation,SVPWM),提出一种混合式的三电平中点平衡控制策略。该控制策略在低调制度下,根据中点电压偏移情况,结合三相电流,明确重叠区域的扇区选择原则,克服非冗余小矢量造成的中点偏移;高调制度下,充分考虑中矢量对中点偏移的影响,对不同的小三角形设置不同的时间控制因子,实现对中点电位平衡的精细化控制。
三电平拓扑结构具有输出容量大、输出电压高、电流谐波含量小等优点,使得三电平结构在高压大功率交流电机变频调速领域得到了广泛的应用。研究对不同负载情况下影响中点电位的因素进行了分析,将中点电位的不平衡分为低频振荡和电压偏移两种情况,三电平逆变器在接线性负载时输出的负序电流和接非线性负载时电流的奇次谐波都会造成中点电位的低频振荡;接非线性负载时电流的偶次谐波会造成中点电位的偏移,其中输出电流的 2 次和 4 次谐波是造成偏差的主要原因。
有源电力滤波器(APF:Active power filter)是一种用于动态抑制谐波、补偿无功的新型电力电子装置,它能够对不同大小和频率的谐波进行快速跟踪补偿,之所以称为有源,是相对于无源LC滤波器,只能被动吸收固定频率与大小的谐波而言,APF可以通过采样负载电流并进行各次谐波和无功的分离,控制并主动输出电流的大小、频率和相位,并且快速响应,抵消负载中相应电流,实现了动态跟踪补偿,而且可以既补谐波又补无功和不平衡。
三电平apf有源滤波器的设计研究
随着电力电子设备等非线性负载的广泛应用,谐波和无功问题日益凸显。而有源电力滤波器( APF) 正是解决这一难题的有效手段。在当前低压领域 APF 已经日益完善,而大功率电力电子装置的应用使得大功率中高压 APF 的需求日益迫切。对此,学术界提出了 三 电 平 APF 的 方 案。相比于传统的两电平 APF,三电平 APF 可以承受更高的电压,具有更低的谐波畸变率、更低的开关频率和更少的损耗,因此更加适用于中高压大功率领域。三电平 APF 要求具有较高的补偿带宽和较低的开关纹波电流。而 LCL 滤波器可以兼顾低频段增益和高频段的衰减,在同样的开关频率下,LCL 所需电感更小,在大功率的场合可以有效地减小系统的体积和降低成本,因此 LCL 滤波器在大功率的场合具有广阔的应用前景[3]。但 LCL 滤波器是一个三阶系统,存在谐振现象,需要增加阻尼环节来抑制谐振,以确保系统的稳定性。LCL 的参数设计和稳定控制是现阶段研究热点,不少学者都对此进行了相关的研究,但大多是关于两电平系统,对于三电平 APF 系统 LCL 的设计和控制的研究较少,因此对三电平 LCL 滤波器的进一步研究是很有必要的。
Liserre 等首次提出了电压源型逆变器( VSI) 的 LCL 滤波器设计方法,给出了一般 PWM 整流器的 LCL 滤波器设计和控制系统分析方法。文献[5]对 APF 的 LCL 滤波器各个元素进行了分析比较,给出 LCL 滤波器设计的一般步骤,但该文的电流跟踪方法是开关频率不确定的滞环控制,不能完全适用于其他固定开关频率的电流跟踪控制。文献给出了三电平 PWM 整流器的 LCL 设计方法,对于仅考虑基波的常规 PWM 整流器具有良好的效果,但不适用于三电平 APF。常规的 PWM 整流器输出的正弦基波电流,而 APF 需要输出各次谐波电流,这对于 LCL 滤波器提出了更高的要求, LCL 滤波器必须具有更大的带宽和更好的稳定性。
本研究 以三电平APF为研究对象,对三电平APF 的开关纹波电流进行详细分析,讨论 LCL 滤波器的各个参数对系统性能的影响; 然后,提出基于三电平 APF 的 LCL 滤波器的设计与控制方法; 根据所需要补偿的谐波的最高次数来确定 LCL 滤波器谐振频率,进而在设计原则和约束条件下得到 LCL 滤波器的各个参数。
1 LCL 滤波器分析
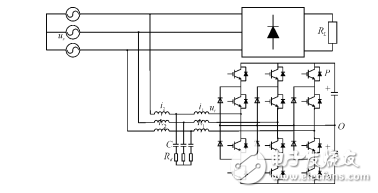
三电平 APF 系统如图 1 所示。系统主要包括三电平逆变器、LCL 滤波器和非线性负载 3 部分。
为了设计一个适合的 LCL 滤波器,首先需要给出 LCL 滤波器的设计原则。
1. 1 LCL 滤波器设计原则
LCL 滤波器的设计主要从性能、成本、效率、稳定性方面进行考虑,具体包括纹波电流的衰减、电感成本、损耗和抑制谐振等。
1. 1. 1 开关纹波的最大衰减
忽略阻尼电阻的条件下,根据 LCL 的单相等效电路可以得到相应的传递函数:
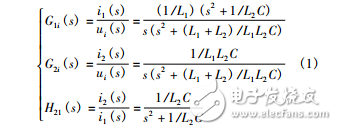
式中: G1i ( s) —输出电压 ui 到逆变器侧电流 i1 的传递函数,G2i ( s) —输出电压 ui 到网侧电流 i2 的传递函数, H21 ( s) —逆变器侧电流 i1 到网侧电流 i2 传递函数。
为了消除开关纹波,G1i ( s) 、G2i ( s) 和 H21 ( s) 的幅值应尽可能小。由式( 1) 可知,对于高频开关纹波, G1i ( s) ≈1 /L1 s,因此选取合适的逆变器侧电感 L1 是非常重要的。从等效电路角度分析,对于高频分量,滤波电容相当于短路,C 与 L2 的并联阻抗接近于零,il 由 Ll 自身感抗决定。所以,Ll 的设计主要考虑对 il 纹波电流的抑制。
1. 1. 2 减小电感成本
过大的滤波电感会导致逆变器输出电压损失、减小低频段增益,而受限于直流母线电压,逆变器输出的最大交流电压是有限的。因此总电感量在实际应用中是一个确定的约束条件。同时考虑到经济成本和系统体积,在满足系统性能的前提下应尽可能地降低电感值。
1. 1. 3 损耗的最低化
由于系统存在不稳定的谐振峰,LCL 滤波器需要进行谐振抑制,采用电容支路串联阻尼电阻是一种常用的做法。过大的阻尼电阻将导致出现实数极点,从而导致 LCL 对所有频率电流的衰减,影响 APF 电流的补偿性能。较小的阻尼电阻可以减少系统损耗,但过小的阻尼电阻又可能影响系统的稳定性。一般阻尼电阻的大小可根据谐振点电容阻抗选取:

1. 2. 1 总电感约束条件
LCL 滤波器总电感设计主要考虑到 LCL 滤波器对纹波电流的抑制和电流的跟踪能力。三电平 APF 的 LCL 滤波器设计的不同点在于电平的增加带来的电流脉动变化。L 型滤波器的三电平 APF 电压平衡方程可以简化为:
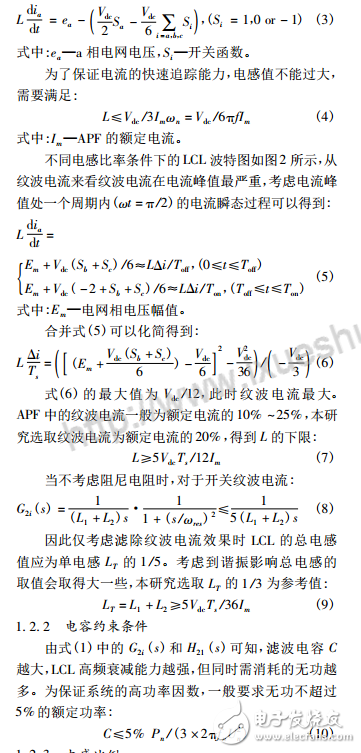
1. 2. 3 电感比例考虑式( 1) 中 G1i ( s) 包括 2 个零点和 3 个极点 ( 其中 1 个极点是 0) :
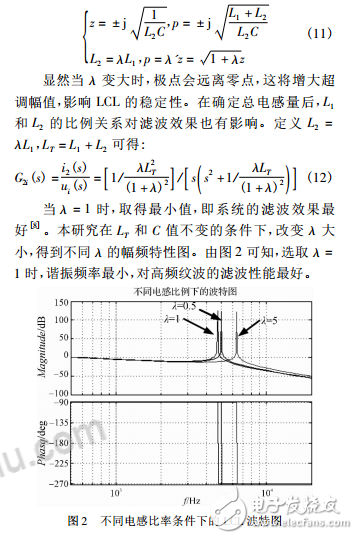
1. 2. 4 谐振频率限制
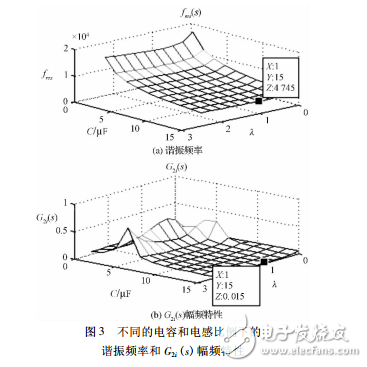
通过 LCL 滤波器的电流不仅包括了低频谐波电流还包括了高频开关纹波电流。如果选取一个较低的谐振频率 fres,将影响低频电流的增益,导致补偿效果不佳。为保证谐波补偿的效果,谐振频率 fres应该尽量取高值,而过高的谐振频率会影响滤波器对纹波电流的抑制能力。因此,与常规的 PWM 逆变器不同,有源电力滤波器的 LCL 谐振频率应该在补偿电流的最高谐波次数对应的频率和1 /2 开关频率之间,从而保证 APF 系统的低频电流增益和对高频开关纹波电流的衰减能力。
2 设计流程
根据前文提出的设计原则和约束条件,LCL 滤波器的设计流程按下面的步骤逐步进行:
步骤一: 定义需要补偿谐波的最高次数为 k,根据文献[3],截止频率 ωc > kωn,ωres > kωn /0. 3( ωn 是额定基波频率) 。考虑谐波补偿和谐振因素一般取:

同时为了抑制开关纹波和防止低次谐波放大,开关频率应该满足 ωsw≥2ωres。更高的开关频率可以获得更好的谐波补偿特性,但会增加更多的损耗,因此一般取谐振频率为 1 /2 开关频率。在 ωres确定以后,参考文献[3]的方法,LCL 的其他值也可以一一确定了。
步骤二: 设定好 ωres后,根据系统的功率,电压,计算系统的基础阻抗,感抗和容抗:
3实 验
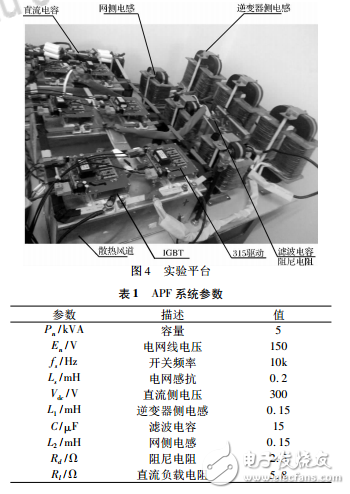
本研究为了验证所提出设计方法的正确性,构建了 5 kVA 三电平 APF 系统。三电平 APF 系统由主电路和控制系统构成。控制系统包括电流内环和电压外环。电流跟踪环节采用 dq 同步旋转坐标系下的 PI 和多并联谐振控制器组进行跟踪控制[9-10]。每一个谐振
控制器可以控制相应的静止坐标下系的两次谐波分量,提高了系统的效率。电压外环使用 PI 调节器维持电压稳定[11]。实验平台如图 4 所示,负载为三相不控整流 RL 负载,系统参数如表 1 所示。
4 结束语
本研究提出了一种三电平 APF 的 LCL 滤波器设计方法。该设计方法简单实用,针对二极管箝位式三电平 APF 特点,笔者分析了由于电平增加带来的纹波电流变化对滤波电感的影响,先选定谐振频率后进行参数的优化,设计流程清晰,适用于三电平 APF 的 LCL滤波器设计。实验结果证明,设计的 LCL 滤波器在谐波抑制和无功补偿方面都可以很好地抑制开关纹波同时保证补偿增益。
本研究采用无源阻尼方式进行控制,这将产生一定的损耗,采用有源阻尼可以解决这一问题,这也是本研究下一阶段的研究方向之一。
关于三电平,有源滤波器,滤波器就介绍完了,您有什么想法可以联系小编。