今天小编要和大家分享的是CCD,传感器相关信息,接下来我将从CCD图像传感器在光栅传感器中的研究与应用,ccd传感器和cmos传感器哪个好,cmos传感器分类,cmos这几个方面来介绍。

CCD,传感器相关技术文章CCD图像传感器在光栅传感器中的研究与应用
光栅传感器原理和结构
光栅传感器基本结构及原理
光栅传感器的作用是能够实现精密测量,其测量原理建立在莫尔条纹的基础上。由于光的干涉效应,将等栅距的两块光栅以微小夹角重叠在一起,可以看到在近似垂直栅线方向上出现明暗相间的条纹,称为莫尔条纹,如图1所示:B为莫尔条纹间距,W为光栅间距:
光栅线夹角θ小,莫尔条纹宽带B越大,相当于把W放大了1/θ倍,大大的提高了测量灵敏度,也方便了光电元件的放置。
本文利用长光栅的位移传感器,借助CCD(电荷耦合器件)图像传感器代替传统的硅光电池检测莫尔条纹,完成了信号的细分,并实现对位移和角度的高精度测量。因此,若利用光栅精密测量位移或角度,可利用光电元件测出莫尔条纹的移动,通过脉冲计数得到度量。

测量系统结构及工作方式
以位移测量为例,通常光栅传感器是由光路系统、一对光栅副、与指示光栅相对位置固定的光电接收元件、整形细分电路组成。当光栅副中任一光栅沿垂直于刻线方向移动时,莫尔条纹就会沿近似垂直于光栅移动的方向运动。当光栅移动一个栅距时,莫尔条纹就移动一个条纹间隔B。光电接收元件将莫尔条纹的明暗强弱变化转换为电量输出。该正弦波经整形为方波,在一个完整的光栅测量系统中,后级电路(往往是以单片机为核心)接收该信号后,根据两路或多路信号的时序关系判别运动方向,并根据方波个数判断位移。
光栅数字传感器的测量分辨率等于一个栅距。但是,在精密检测中常常需要测量比栅距更小的位移量,为了提高分辨率,可以采用两种方法实现:1)增加刻线密度来减小栅距,但是这种方法受光栅刻线工艺的限制。2)采用细分技术,在莫尔条纹变化一周期时,不只输出一个脉冲,而是输出若干个脉冲,以减小脉冲当量,提高分辨力。细分的方法有多种,如直接细分、电桥细分、锁相细分、调制信号细分和软件细分等。下面介绍论文采用的4倍直接细分的信号处理过程。
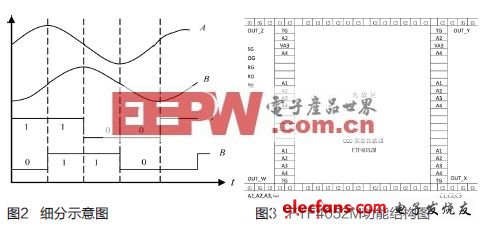
根据莫尔条纹的性质,光电元件产生的信号近似为正弦波。A、B为两个光电元件,使A、B的位置相距1/4B那么A、B输出的正弦信号相位差π/2,如图2所示。设莫尔条纹移动方向为从A到B。A领先Bπ/2,A、B两路信号经整形后变为方波,以1/4个周期为单位时间,则在一个周期内的4个单位时间内,A依次为1、1、0、0,B依次为0、1、1、0,AB代表的二进制数为10,11,01、00,即光栅移动一个栅距内,可以得到4组信号,根据不同的信号值从而将位移确定在1/4个栅距内,实现了4倍细分。同时根据AB代表的系列值可以判断移动方向。
CCD图像传感器在光栅传感器中的应用
图像传感器的选用
根据以上对光栅传感器的剖析,可以看出要想提高对莫尔条纹的细分精度,可以采用提高光栅线的密度或放置更多路光敏元件实现对信号更高倍的细分的方法。但是由于工艺上的难度成本上的限制,不可能无限制地提高光栅线的密度,目前较普遍的是1mm 50~100线。也不可能精确地在保证一定的相位差下放置多路光敏元件。所以从以上两点入手试图改进光栅传感器的精度意义不大。目前的光栅传感器一般采用硅光电池,再配以相应的后续电路完成信号处理。所以考虑采用新的图像探测器件来取代传统的光电池是另一种值得考虑的方法。
CCD图像传感器与互补金属氧化物半导体(CMOS)图像传感器目前已经得到大量而广泛的应用。CCD图像传感器和CMOS图像传感器都基于硅半导体材料,但由于工作机理和结构的不同,这两种传感器在性能上存在着很大的区别,主要体现在集成度、读出方式、功耗、动态范围、灵敏度和价格上。虽然CMOS图像传感器的生产过程较简单、成本较低、功耗较小,但其具有信噪比低、宽动态范小、电荷转换效率低和输出图像质量低的缺点,而CCD图像传感器的最大优点是信噪比高、灵敏度和动态范围大、电荷转换效率高和输出图像质量高。综合以上特点,对于光栅传感器的应用来说,CCD更适于对精度和灵敏度要求较高的莫尔条纹的检测。
CCD图像传感器的功能是把二维图像光学信号转变成一维视频信号或数字信号。从结构上分为线阵CCD和面阵CCD两大类,从受光方式分为正面光照和背面光照两种。线阵CCD有单沟道和双沟道两种信号读出方式,其中双沟道信号读出方式的信号转移效率高。面阵CCD的结构复杂,常见的有帧转移(FT) CCD、全帧转移(FFT)CCD、隔列内线转移(IIT)CCD、帧内线转移(FIT) CCD、累进扫描内线转移(PSIT) CCD等。如以帧转移(FT) CCD 面阵,CCD由成像区(光敏区)、暂存区和水平读出寄存器三部分构成。每个成像单元称为一个像素。假定有M个转移沟道,每个沟道有N个成像单元,那么整个成像区共有M×N个像素。暂存区的结构和单元数与成像区相同,暂存区与水平读出寄存器均作遮光处理。工作时,图像经物镜成像到光敏区,光敏区上面的电极加有适当的偏压时,光生电荷被收集到电极下方的势阱里,这样就将光学图像变成了电荷包图像。当光积分周期结束时,加到成像区和暂存区电极上的时钟脉冲使所有收集到的信号电荷迅速转移到暂存区中,然后经由水平读出寄存器,在时钟脉冲控制下,经输出级逐行输出一帧信息。在第一帧读出的同时,第二帧信息通过光积分又收集到势阱中。这样可以一帧一帧连续地读出。
系统设计
下面采用CCD图像传感器FTF4052M芯片实现对莫尔条纹的检测。DALSA公司的FTF4052M型CCD是一款全帧型CCD图像传感器,具有22M像素(4008×5334)的超大分辨率全帧CCD图像传感器,内部功能结构如图3所示。
图3中,芯片在结构上分为3部分:⒈中间最大的区域为光敏区,即光积分区域。每个光敏单元都有在行列方向上的地址,行选通逻辑和列选通逻辑共同选定某光敏单元,考虑到各像敏单元的偏置电压不均匀,使用增益控制和平衡控制等辅助电路对信号进行校正。特别是对于处于莫尔条纹光强波谷处的像敏单元,其信号是微弱的,此时该校正是很必要的。⒉上下两部分为两个输出寄存器。将光积分生成的电荷水平转移到4个角的输出放大器,输出放大器将光生电荷形成的电压信号放大并转移出CCD。C1、C2、C3为水平像素转移寄存器的时钟信号。A1、A2、A3、A4为垂直行驱动时钟信号。⒊TG是光敏区与输出寄存器之间的隔栅;OG是输出栅;SG是输出栅之前的最后一个栅;RG是输出放大器。该芯片的最大特点是将光敏区生成的图像分成W、X、Y、Z四个对称的象限,每个象限的电荷可以以不同的方向转移,通过四个输出端同时输出,有效地提高了帧速率,单端输出的帧速率为1FPS,而四端同时输出就可以达到3.6FPSs。工作时,莫尔条纹投射在CCD图像传感器表面,莫尔条纹沿X轴向左或向右平移,产生明显的莫尔条纹光强分布。
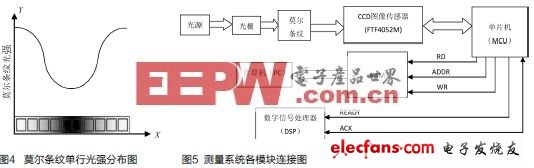
由于CCD图像传感器的同一列像元从上至下的光强分布是一致的,莫尔条纹的光强分布只是体现在行方向上,所以无需进行逐行扫描,只需考察一行上的像元信号即可分析莫尔条纹的移动情况,这样大大降低了信号处理任务。图4代表莫尔条纹在一行像敏单元上的光强分布,X轴为莫尔条纹移动方向,Y轴表示光强的大小。莫尔条纹在各行分布一致的情况仅仅是理想的情况,实际上由于光栅线质量,光栅间隙等工艺因素的影响,各行情况会略有差别,所以可以考虑选择不同位置的几行,考察其光强分布情况,避免信号质量差时过大的单行误差,达到降低误差的目的。
FTF4052M和光栅传感器、DSP、MCU和PC组成测量系统时,系统工作原理框图如图5。
系统上电后,CCD图像传感器初始化,根据相关寄存器值控制有关参数,确定采集图像的窗口位置、大小和工作模式;MCU通过对FTF4052M 芯片发出时钟信号指令、以及对FTF4052M 芯片进行时序控制,来完成参数的配置;系统配置完后,FTF4052M 芯片开始对莫尔条纹信号进行采集,并输出同步信号给MCU,其包括垂直同步信号、水平同步信号、数据同步信号,判别一帧图像数据的开始和结束;DSP发出读信号请求后,MCU根据同步信号决定是否开始数据采集;采集的数据被送至RAM;DSP接收到READY信号后开始采集数据并处理;数据最终被送往PC进行处理,得出测量结果。
结论
从信号处理的角度来说,最简单的方法就是通过调整光栅夹角,使莫尔条纹间隔B和CCD图像传感器最大感知图像的行方向长度一致,设其为L。该方向有n个像素,将L分为n份, 即细分倍数达到n倍,对位移的分辨精度达到了W/n(以FTF4052M为例,其分辨率为1312 ×1036)。设光栅线密度为100线/mm,W=0.01mm,故位移分辨精度为:W/n=0.01/1312 7nm。考虑到光栅线质量问题等,该理论值并不代表整个传感器在实际测量中能达到的精度。但经过实测,采用CCD图像传感器对莫尔条纹的分辨精度远远高于采用传统的硅光电池和整形细分电路等对莫尔条纹的分辨精度。并且,随着集成电路技术的提高,CCD图像传感器的性能指标也在不断的改善,对莫尔条纹的分辨率将不断提高,满足光栅传感器现在和未来的高精度、高分辨率等测量需求将绰绰有余,理论上,若提供的莫尔条纹信号质量足够高,则可以实现纳米级的测量精度。
关于CCD,传感器就介绍完了,您有什么想法可以联系小编。