热继电器工作原理及图形符号
热继电器的工作原理
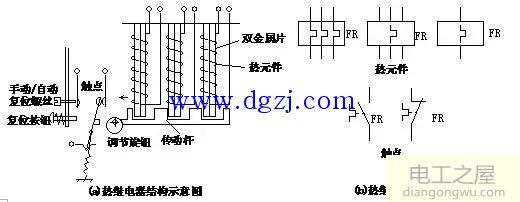
图(a)所示是双金属片式热继电器的结构示意图,图(b)所示是其图形符号。由图可见,热继电器主要由双金属片、热元件、复位按钮、传动杆、拉簧、调节旋钮、复位螺丝、触点和接线端子等组成。
双金属片是一种将两种线膨胀系数不同的金属用机械辗压方法使之形成一体的金属片。膨胀系数大的(如铁镍铬合金、铜合金或高铝合金等)称为主动层,膨胀系数小的(如铁镍类合金)称为被动层。
由于两种线膨胀系数不同的金属紧密地贴合在一起,当产生热效应时,使得双金属片向膨胀系数小的一侧弯曲,由弯曲产生的位移带动触头动作。
热元件一般由铜镍合金、镍铬铁合金或铁铬铝等合金电阻材料制成,其形状有圆丝、扁丝、片状和带材几种。
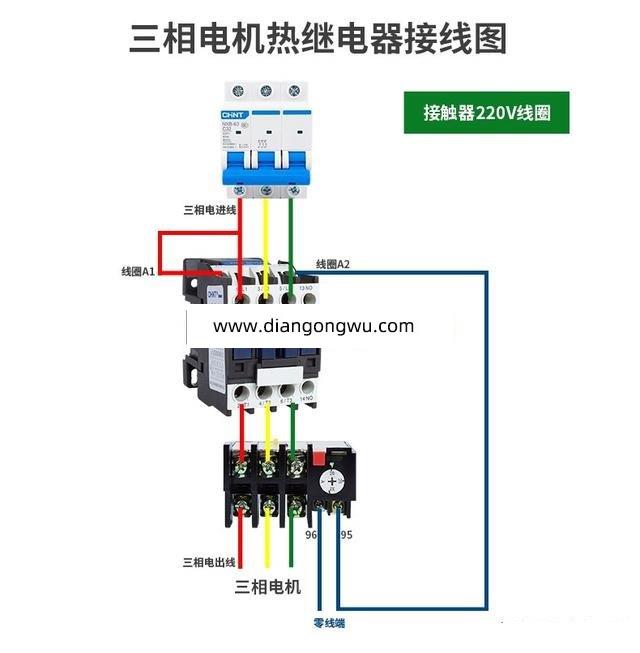
热元件串接于电机的定子电路中,通过热元件的电流就是电动机的工作电流(大容量的热继电器装有速饱和互感器,热元件串接在其二次回路中)。
当电动机正常运行时,其工作电流通过热元件产生的热量不足以使双金属片变形,热继电器不会动作。
当电动机发生过电流且超过整定值时,双金属片的热量增大而发生弯曲,经过一定时间后,使触点动作,通过控制电路切断电动机的工作电源。
同时,热元件也因失电而逐渐降温,经过一段时间的冷却,双金属片恢复到原来状态。

热继电器动作电流的调节是通过旋转调节旋钮来实现的。调节旋钮为一个偏心轮,旋转调节旋钮可以改变传动杆和动触点之间的传动距离,距离越长动作电流就越大,反之动作电流就越小。
热继电器复位方式有自动复位和手动复位两种,将复位螺丝旋入,使常开的静触点向动触点靠近,这样动触点在闭合时处于不稳定状态,在双金属片冷却后动触点也返回,为自动复位方式。
如将复位螺丝旋出,触点不能自动复位,为手动复位置方式。在手动复位置方式下,需在双金属片恢复状时按下复位按钮才能使触点复位。