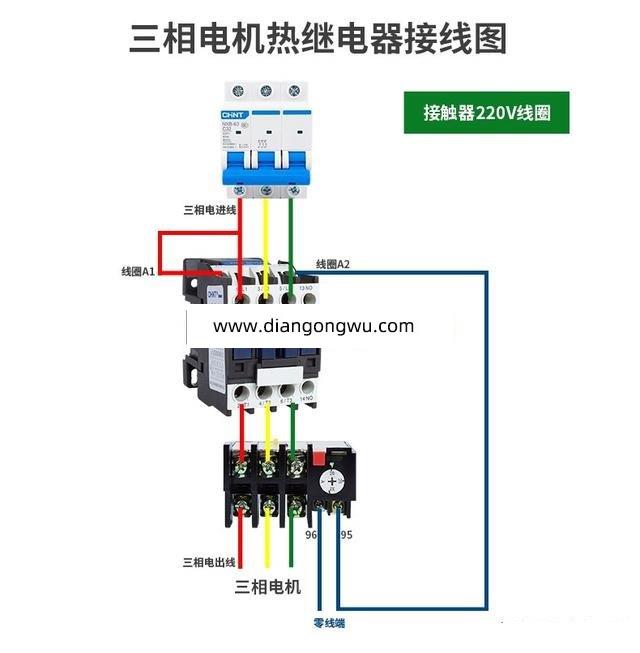
热继电器工作原理及结构图解
热继电器,俗称热偶,是防止电机过载的一种保护。它的结构是通过热电阻片,在运行过程中,电动机的电流一旦超过了设定的电流值,热金属片就会变形。驱动辅助接点动作转换,断开接触器线圈的控制回路。使接触器跳闸。从而保护电机避免因过载而烧损。热继电器上的电流整定值。实际上就是调整辅助节点的转换灵敏度,从而适应不同瓦数电机的要求。
另外说一句题外的话,因为热继电器是靠热金属片发热变形而动作。需要一定的时间才能动作。所以它只能起到过载保护的作用,而不能起到短路保护作用。所以热继电器替代不了空气开关。必须与空气开关配合使用。能够全方位的保护电机。
热继电器主要用来对异步电动机进行过载保护,它的工作原理是过载电流通过热元件(双金属片)后,使热元件加热弯曲去推动动作机构来带动常闭触点动作,从而将电动机控制电路断开,交流接触器吸引线圈失电,使电动机断电停止,起到过载保护的作用。由于双金属片受热弯曲过程中,热量的传递需要较长的时间,因此,热继电器不能用作短路保护,而只能用作电动机过载和缺相保护,防止电动机因过载和缺相而烧毁,对电动机起到了很好保护作用。
热继器的额定值和整定值的选择,可按电动机的额定电流选择热继电器。取热继电器整定电流的0.95~1.05倍或中间值等于电动机额定电流。使用时要将热继电器的整定动作电流调至电动机的额定电流值。
热继电器是用双层金属不同的热涨冷缩系数,控制接触器动作的继电器,这种继电器的双金属片串连在线路中,当线路电流过大,双金属片会发热,因为不同的热涨系数,双金属片变弯,常闭触点断开,接触器断电脱离,起到保护电机的作用。
热继电器是电机拖动重要电气装置,其原理是利用双金属片因过热发生形变的物理特性,可以看成一个常闭开关,把其串联在电机拖动的控制回路中,因为某种原因过热,热继电器动作状态变为开点,控制回路电机主接触器线圈失电主触头分离,电机停止。对电机起过热保护。
热继电器的工作原理是由流入热元件的电流产生热量,使有不同膨胀系数的双金属片发生形变,当形变达到一定距离时,就推动连杆动作,使控制电路断开,从而使接触器失电,主电路断开,实现电动机的过载保护。一般用“FR”表示,继电器作为电动机的过载保护元件,有体积小,
结构简单、成本低等优点。
热继电器工作原理示意图如图1
向左转|向右转
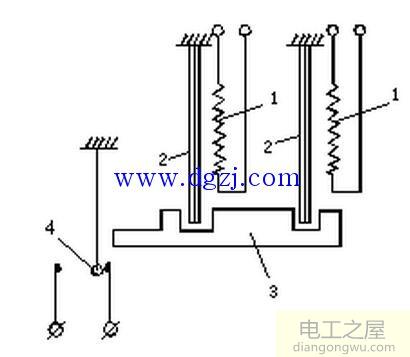
图1 热继电器工作原理示意图
1——热元件,2——双金属片,3——导板,4——触点
热继电器的结构如图2所示
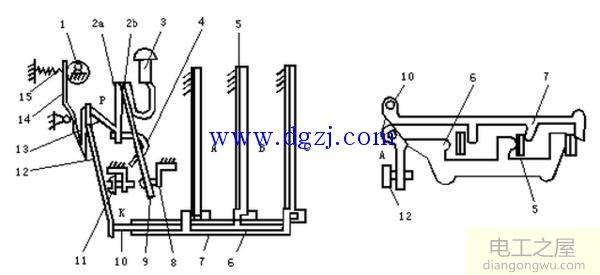
图2 热继电器结构示意图
图2中:1——电流调节凸轮,2——片簧(2a,2b),3——手动复位按钮,4——弓簧片,5——主金属片,6——外导板,7——内导板,8——常闭静触点,9——动触点,10——杠杆,11——常开静触点(复位调节螺钉),12——补偿双金属片,13——推杆,14——连杆,15——压簧
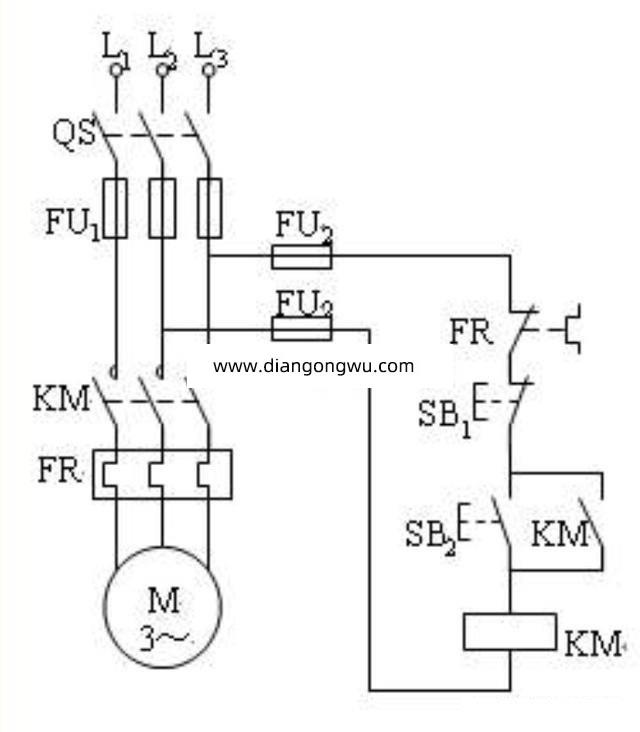
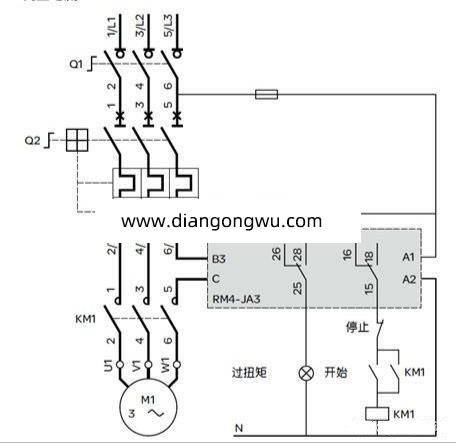
使用热继电器对电动机进行过载保护时,将热元件与电动机的定子绕组串联,将热继电器的常闭触头串联在交流接触器的电磁线圈的控制电路中,并调节整定电流调节旋钮,使人字形拨杆与推杆相距一适当距离。当电动机正常工作时,通过热元件的电流即为电动机的额定电流,热元件发热,双金属片受热后弯曲,使推杆刚好与人字形拨杆接触,而又不能推动人字形拨杆。常闭触头处于闭合状态,交流接触器保持吸合,电动机正常运行。
若电动机出现过载情况,绕组中电流增大,通过热继电器元件中的电流增大使双金属片温度升得更高,弯曲程度加大,推动人字形拨杆,人字形拨杆推动常闭触头,使触头断开而断开交流接触器线圈电路,使接触器释放、切断电动机的电源,电动机停车而得到保护。 热继电器其它部分的作用如下:人字形拨杆的左臂也用双金属片制成,当环境温度发生变化时,主电路中的双金属片会产生一定的变形弯曲,这时人字形拨杆(我理解的意思是推杠)的左臂也会发生同方向的变形弯曲,从而使人字形拨杆与推杆之间的距离基本保持不变,保证热继电器动作的准确性。这种作用称温度补偿作用。 螺钉8是常闭触头复位方式调节螺钉。当螺钉位置靠左时,电动机过载后,常闭触头断开,电动机停车后,热继电器双金属片冷却复位。常闭触头的动触头在弹簧的作用下会自动复位。此时热继电器为自动复位状态。将螺钉逆时针旋转向右调到一定位置时,若这时电动机过载,热继电器的常闭触头断开。其动触头将摆到右侧一新的平衡位置。电动机断电停车后,动触头不能复位。必须按动复位按钮后动触头方能复位。此时热继电器为手动复位状态。若电动机过载是故障性的,为了避免再次轻易地起动电动机,热继电器宜采用手动复位方式。若要将热继电器由手动复位方式调至自动复位方式,只需将复位调节螺钉顺时针旋进至适当位置即可。