
射频识别认证协议必须考虑的另一个问题是标签的位置跟踪。本协议含有反位置跟踪设计。每次认证获通过后,标签都会更新影子图像S2,且随机数R的值也在更新变化,所以标签对读写器的每次回答(Hash(ID||R)和EN(S2))是不同的,从而实现了标签的反跟踪。
3.3 前向性和同步性安全分析
假设某标签被攻击者攻破并获得密钥,攻击者将得到正在使用的影子图像S2。但由于每次验证通过后,系统都会随机产生二值图像P来更新标签中的影子图像S2,这些影子图像间无任何关联,所以即使当前S2被窃取,也无法从现有的值推算出之前的S2,不可获得标签的历史活动记录。
协议对标签的认证获通过后,数据库为更新的S2new建立新记录,同时保留旧的S2对应的记录。若S2new更新不成功,标签仍能使用旧的S2实现与读写器的身份验证,这样就防止了S2更新时可能出现的异常情况。
3.4 其它性能分析
标签中只存储标签ID和影子图像S2,一次认证过程需2次哈希运算和1次加密、解密运算,降低了标签的存储空间、运算复杂度。因此这在低成本的标签上较易实现。每次认证时后台数据库在2N(N为标签的个数)条记录中搜索,进行1次哈希运算,产生2个随机数,作一次视觉密码的加、解密运算,且视觉密码的加解密运算量较小,所以本方法延时短、速度快,效率高。
3.5 与其它协议性能比较
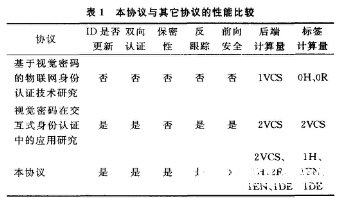
表1为本协议与文献[5]、[6]协议的比较。表中VCS为视觉密码加密或解密,H表示哈希运算,R表示产生随机数操作的次数,EN为对称加密算法,DE为对称解密算法。
4 结语









