
FK6张力测量范围CN0-80/0-120/0-180;综合误差%FS1.2;长期零位漂移%FS1.2;一年长期增益漂移%FS1.2;一年零位漂移%FS1.2≥48 h(同上);温度漂移%FS/10℃0.325~70℃;非线性%FS1.2。FK6传感器输出为DC 4~20 mA标准仪表信号(或电压信号DC 0~10 V/0~5 V),接口电路形式较为简单。在此,主要对采用称重法的应变片传感器电路进行说明,图2为其接口电路图。
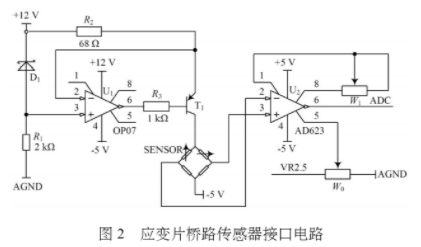
应变片组成的桥路包括恒压供电和恒流供电两种形式。设计采用恒流供电形式,电路采用OP07运算放大器形式。该电路形成恒流供电主要是运算放大器同相端接2 V稳压管,加在运算放大器U1反相端电阻R2(68 Ω)上的电压也为2 V。因此,流过电阻R2上的电流不因负载变化而变化。此外,在收放卷过程中,因张力变化引起桥路不平衡将有电压信号输出,输出的电压信号经仪表放大器AD623放大后传送至MPU的A/D
转换器。其中,W1为增益调整电位器;W0为零点电平调整电位器。控制电路及通信接口主要采用恒流信号输出控制,单片机与上位机通过MAX 232串行接口通信。
3 系统软件设计
3.1 控制程序设计
张力控制器软件采用PID控制方法完成对各功能模块的控制,实现参数标定、设置、张力测量、恒流信号输出等功能。软件完成初始化设置后,进行张力信号的数据采集与处理、恒流控制输出等。根据实际工况,张力信号数据采集需要进行滤波处理,采用基于提升框架的滤波算法进行仿真试验。实验结果表明,该算法可以有效消除各类噪声,与国外产品的相关技术相比具有一定的先进性。
控制算法采用积分分离式的PID控制,防止偏差较大时造成PID运算的积分积累,避免控制量超过制动器的最大动作范围。当控制量与设定值的偏差较大时,取消积分作用;当控制量接近设定值时,加入积分作用,以便消除静差,提高控制精度。在实际运行中,根据实际需要还可以取消微分的调节作用,图3为程序流程图。









