
(3)孔洞填充处理
经阈值处理之后的二值化图像目标区域内部可能会出现孔洞,其原因可以是光照条件、背景与目标在像素值上差别不明显,以及阈值选取不 合理等等。其处理思想为数学形态学的闭合算法。经过填充处理,目标区域(籽粒)内部的 孔洞得到填补。
(4)区域分割
仅仅采用阈值处理难以获得精确的区域分割结果。图3是图2图像中沿直线L的灰度直方 图,其中A、B、C、E、F、G六点都存在较大的灰度跳跃,而D点跳跃幅度小,显然,以D点取 阈值,会导致图像失真,无法得到精确的籽粒特征;而取低于D的A、B、C、E、F、G灰度值 为检测阈值,可以得到较为准确的籽粒边缘,但不能检测到D点存在的边缘信息。因此,当 阈值处理不能满足要求的情况下,需要利用形态学算法对图像进行分割。
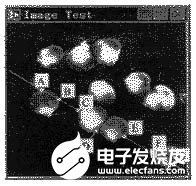
图2原始图像
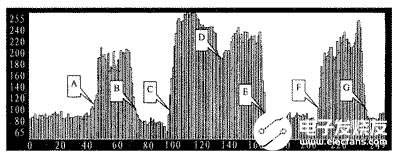
图3原始图像的灰度直方图
图象分割是将数字图象划分为互不相交(不重叠)区域的过程,是模式识别的基础。区 域分割是实现图象分割的一种方法,即把各像素划归到各个对象或区域中。对象一旦被分离 ,就可以对其测量和分类。
系统通过以上处理-滤波、二值化、孔洞填充等,为正确地区域分割奠定了基础。区域 分割的原理是“开启”算法。首先确定连通性准则为8连通,(8连通的结果与人的感觉更接 近),取结构元素为7×7矩阵模板,矩阵的中间位置为结构元素的原点。
经连续4次的腐蚀之后,将籽粒完全分离开来,见图4(b)。此时,图象中共包含31个对象。









