
您可以根据与NI SoftMotion轴进行关联的硬件,创建以下类型的轴:
NI 951x轴(扫描界面模式)
仿真轴
固态工作轴
无限制轴
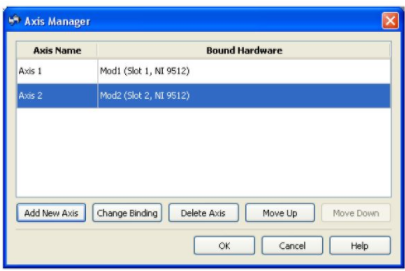
图1:NI SoftMotion轴管理器对话框
使用配置坐标空间对话框将轴在坐标系中进行组织。坐标系是轴的逻辑组合,用来作为可以使用坐标系资源的NI SoftMotion函数模块的输入。使用坐标系,您可以指定多个轴运动,确保所有的轴在相同的时间开始和结束。这与在同一时刻开始并非坐标系组成部分的独立轴不同——轴开始运动是同步的,但停止运动却不是同步的。
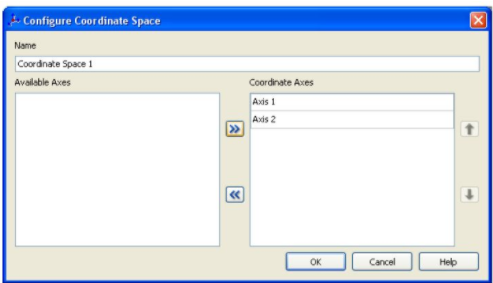
图2:NI SoftMotion配置坐标系空间对话框

图3:含有完成配置的运动轴与坐标系空间的LabVIEW项目
所有运动控制I/O和执行信息都被加入全局扫描引擎内存映射,并在每个扫描周期进行更新。在同一个扫描周期中执行的函数模块在相同的扫描周期进行同步,其中包括线性、停止、调速和凸轮系统。这意味着您可以在同一个扫描周期中开始轴、坐标系、调速操作或是凸轮系统操作。然而,以同步方式开始的轴并不同步地结束。为了同步结束这些运动,您必须在同一时间计算结束所有轴运动的约束条件,或是配置坐标系从而能够自动计算这些数值。









