
2 方案论证
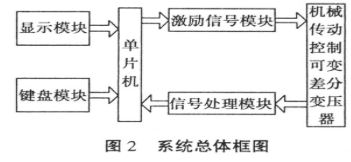
根据题目要求和本系统的设计思想,系统主要包括激励信号模块,机械传动模块,信号处理模块,显示模块和键盘模块,系统总体框图如图2所示。
方案一:激励信号模块采用高精度,高频率,低输出电阻,驱动能力强的函数发生器芯片MAX038产生一个固定的100kHz频率;机械传动模块采用直条齿轮来驱动磁棒移动,首先要求电机齿轮与直条齿轮的齿相匹配,将直条齿轮与磁铁连接,通过电机的圆形齿轮来带动直条齿轮左右移动,也即是带动磁棒在套简内左右移动;信号处理模块首先通过OP37对差动变压器副边的信号进行放大,在经过半波整流、电子滤波,得到稳定的直流电压,在送入单片机内部的AD转换器进行处理,通过AD转换后A、B两点的电压就可算出d的值,从而得到位移与d的关系式,在通过数码管显示,同时可以通过键盘设定允许范围内的任意值,并准确运行到指定的地点。
方案二:激励信号模块采用DDS芯片AD9851,该芯片性能稳定,工作可靠,能产生100kHz稳定的频率;机械传动模块采用直流电机控制螺栓实现铁淦氧磁棒精确定位,电机每转动一圈,能产生一个固定的位移量,而且通过单片机控制可以让直流电机转动相应的圈数,以便达到设计要求;信号处理模块首先通过TI公司的仪表放大器INAll8实现小信号的放大,在经过半波整流、电子滤波,得到稳定的直流电压,在通过16位8通道AD转换器ADS8344进行处理,通过AD转换后A、B两点的电压就可算出d的值,从而得到位移与d的关系式,在通过液晶进行显示,同时可以通过键盘设定允许范围内的任意值,并准确运行到指定的地点。综合以上两种方案,我们采用方案二。









