2、 AD8302工作原理及模式
2.1 AD8302幅度和相位测量原理
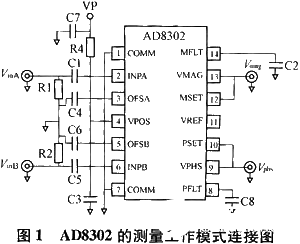
AD8302幅度和相位测量工作模式连接如图1所示。其原理是基于对数放大器具有对数压缩的功能,一般数学表达式为:
式中:Vin为输入电压;VZ为截距;Valp为斜率。
AD8302正是利用上述原理,通过精密匹配的2个宽带对数检波器来实现对2个输入通道信号的幅度和相位测量,其幅度和相位测量方程式为:
式中:VinA为A通道的输入信号幅度;VinB为B通道的输入信号幅度;Vmag为幅度比较输出;φ(VinA)为A通道的输入信号相位;φ(VinB)为B通道的输入信号相位;Vφ为斜率;Vphs为相位比较输出。
2.2 AD8302测量工作模式
AD8302有测量、控制器和电平比较器3种工作方式,但主要功能是测量幅度和相位。如图1所示,当芯片输出引脚VMAG和VPHS直接与芯片反馈设置输入引脚MSET和PSET相连时,芯片的测量模式将工作在默认的斜率和中心点上(精确幅度测量比例系数为30 mV/dB,精确相位测量比例系数为10 mV/(°))。另外,在测量模式下,工作斜率和中心点可以通过引脚MSET和PSET的分压加以修改。
在低频条件下,幅度和相位测量方程式为: