
上位链接的参数设置:波特率:115200; 7位数据位;偶校验;2位停止位。
PLC的系统框图如下:
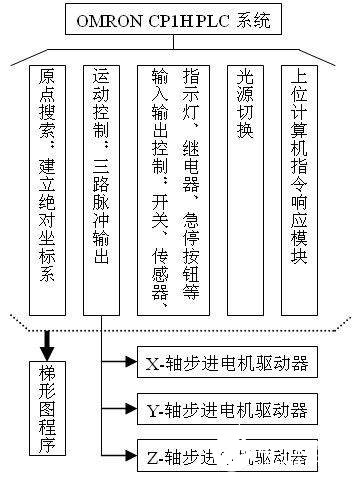
通过计算机系统与PLC系统协同工作,各司其职,充分发挥各自的特长,使系统的性能得以优化。
四、 图像采集
NI提供两种标准的图像采集vi程序,用户可以直接调用:
1.单帧图像采集1394-snap-acquire:即每次只采集1帧图像。在本系统的全自动测量过程中,共有三个被测区域,每个区域又有三种照明模式,所以一共需要运行9次单帧图像采集程序。
2.连续图像采集1394-grab-acquire:即连续实时采集图像。在本系统的运动位置设置模块里,需要实时观测镜头与被测目标的相对位置及聚焦情况,然后保存各个位置,所以使用了连续图像采集模式。
五、 图像处理
如上所述,在全自动测量过程中,共采集9帧图像,每幅图像都对应一个图像处理程序,来完成对目标特征的测量和判断。步骤如下:
1.开辟图像缓冲区
在图像处理中,需要对图像做多次变换,因此需开辟多个图像缓冲区来存储图像数据。本系统中共设置100个图像缓冲区,即image buffer0~buffer99, 其中buffer0为系统实时图像缓冲区;buffer1~buffer51分别存储9帧图像的彩色原图、Intensity 图层、Red图层、Green图层、Blue图层、Mask图层、Overlay图层等作为历史图像数据,可以和测量结果数据相对照;其余为临时图像缓冲区,为避免与历史图像缓冲区发生冲突,从buffer99开始向下使用。本系统只使用了12个临时buffer, 即buffer99~ buffer88,buffer52~buffer87未使用。
2.定位原点并建立坐标系
选取图像上不发生变化的特征,使用Match Pattern 或Detect Object来定位原点并建立坐标系。三个检测区域分别以中间的LED窗口即AUTO LED、OFF LED、Defrost LED的中心为该幅图像的坐标原点。









