
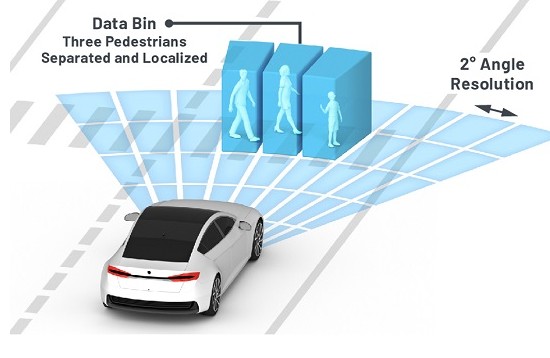
图2.高分辨率成像雷达可以显示隐藏物体。
成像雷达的角度分辨率为1°至2°,是非成像雷达分辨率的10倍。数据箱收集1°到2°分辨率的信息,帮助区分和确定3名行人的位置。
数据处理
您为更高分辨率所花费的成本将给您带来更多数据,随着分辨率增加,数据量也相应增加,这就需要更多的计算能力。这就是为什么高效处理所有数据的先进模式对于管理大量数据和低功耗至关重要。高效的中央处理或者边缘处理,将是未来雷达的基础。
下一步:协同雷达与通信需求
Mike Keaveney说道:“利用现有车载雷达传感器硬件的协同雷达是未来汽车领域的发展方向。协同雷达就是相干性和识别协同创建高分辨率相干图像的事物需求,在本例中是指检测雷达。一旦实现了协同雷达的经济性,就能够享受诸多优势。”
协同雷达可提供成像雷达性能,而不会显著增加车内个别现有雷达系统的大小。这是因为有效孔径现在由两个(或多个)具有重叠视场的分布式雷达传感器之间的距离设定,而不是由任何一个传感器的物理尺寸预先确定。
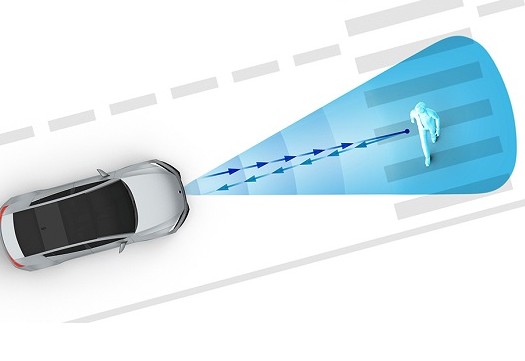
图3.初级雷达的窄孔径。
初级雷达现在常用于汽车。
来自每个发射源的雷达信号反射到一个物体上,然后传回到原点。孔径,或者说初级雷达的性能,是以英寸为单位的雷达发射器本身的宽度。









