
2.2 控制器的设计
2.2.1总体设计
控制器作为伺服系统的核心,将来自各传感器的检测信息和外部输入命令进行集中、分析和加工,按照一定的程序给出相应的指令,从而控制整个系统有条不紊地运行,因而无疑对整个系统性能的优劣起着非常重要的作用。
PID控制算法是一种工业控制中广泛应用的控制策略,传统的PID控制器具有原理简单,设计简便,易于调整,稳态性能好等优点,对具有线性、有确定模型的系统易于整定到最佳控制效果。但本文的颤振激励系统的同步伺服系统是两台无刷直流电机,均为PWM调速,速度大小与调速电压之间的关系显然是非线性的。为此,首先在不同的调速电压下做大量的试验,来测定转速,然后通过调速电压、速度数据建立一个基本的数学模型;其次将两路位置信号的差值形成的控制信号送入控制算法;最后在传统PID控制器的基础上应用模糊集合理论,设计一个基于简单模型的模糊PID控制器,能方便的实现参数的在线自整定,以达到较为理想的控制效果。
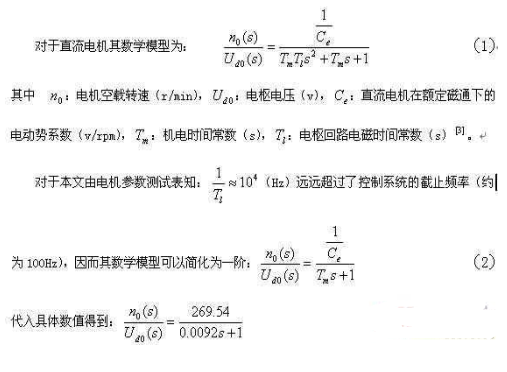
2.2.2电机的数学模型
2.2.3同步算法实现
( 1)速度电压关系分段线性化
本同步伺服系统甲、乙两台电机均为无刷直流电机,设计参数基本一致,电机供电电压为直流15伏,采用PWM调速方式。在正常供电情况下,PWM端输入电压信号大于1.4伏,电机开始转动,随着调速电压信号的加大,电机转速开始加快,但是很明显转速和调速电压之间不是线性关系。为此首先测定转速和调速电压之间的关系,然后将其分段线性化,使电机转速在较窄的范围内和调速电压建立近似线性关系,根据实验数据对于甲、乙两组电机分别算出在转速(r/s)不同的情况,调速电压(V)与转速之间的近似线性关系如下:









