
上位机与PLC 终端控制模块B( ET261) 之间通过CAN 总线进行通信。主变频器INV1 既可以从上位机也可以从ET261 接收转速指令并与测功电机DYNO 根据所接受的转速信号构成转速闭环控制。上位机与被测电机的控制器INV2之间依据实际情况可以采用不同的通信方式,考虑同整车通信协议的一致性,目前采用CAN 总线通信。被测电机及其控制器根据从上位机接受的转矩信号构成转矩闭环控制。
状态监控
上位机对系统的运行状态进行实时监控,并根据不同的状态采取相应的控制策略或随时接受操作人员的指令输入而采取相应的动作。采取分级的故障管理机制以保证系统安全可靠的运行。
主程序运行控制流程
主程序用户图形界面( GUI)
上位机用户图形界面采用LabVIEW 开发。在利用LabVIEW 开发程序界面过程中,充分利用了其在虚拟仪器方面的优势:
虚拟状态灯和系统状态码的合理使用,使操作者可以实时掌握系统运行的当前状态,并以此作为下一步操作的指导;
虚拟仪表盘的使用使操作者察看系统运行的转矩和转速更为轻松和方便;
虚拟示波器的使用使操作者对系统跟踪设定的能力和效果作出实时的评价。
主程序运行控制流程
图4 为主程序运行控制流程图。其中:
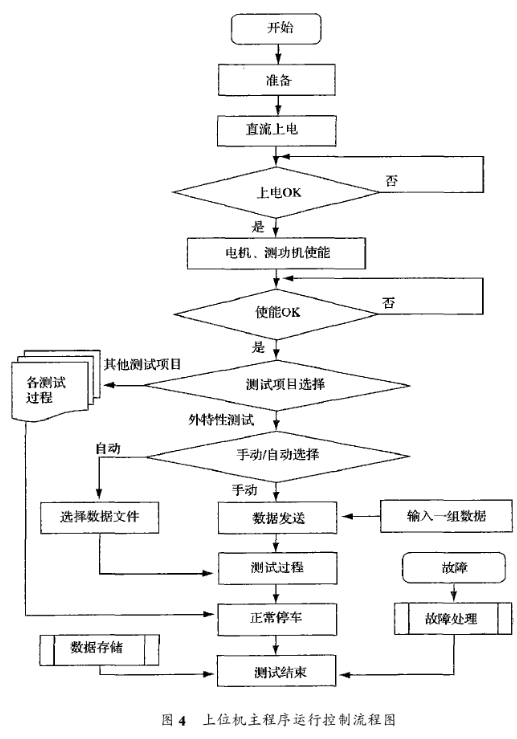
准备准备过程包括工作模式选择、驱动信号选择、文件存储路径选择、数据存储时间间隔设定、最高转速设定、故障日志设定等。根据受试对象的不同会有差别。
数据文件操作测试数据文件和数据存储文件可采用EXCEL 或文本文件格式,以便于测试前后的数据录入和处理。









