
(3) CAN网络上的节点信息可分成不同的优先级,可以满足不同的实时要求;
(4) CAN采用非破坏性总线仲载技术。当两个节点是向网络上发送数据时,优先级低的点主动停止数据发送,而优先级高的节点可不受影响地继续传输数据,大大地节省了总线仲载冲突时间,在网络负载很重的情况下也不会出现网络瘫痪;
(5) CAN的直接通信距离最大可达10km(速率小于5kbps),最高通信速率可达1Mkbps(此时距离最长为40m)。
2、基于CAN控制器的对等式单片机系统软硬件设计
2.1 系统硬件设计
2.1.1 系统组成原理及通信过程
所谓对等式通信,就是单片机多机系统中任一节均可主动地与其它节点直接交换数据,而无须经过第三方。从此角度出发,我们设计的基于CAN控制顺的单片机多机系统组成如图1所示。
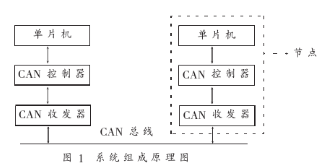
系统中的每个节点由单片机、CAN控制器、CAN收发器组成。单片机主要用于系统的计算及信息处理等功能;CAN控制器主要用于系统的通信;CAN收发器主要用于增强系统的驱动能力。系统的发送过程是:单片机将外围设备或其他节点传送过来的信息处理后,按CAN规范规定的格式将其写入CAN控制器的发关缓冲区,并启动发送命令,把数据发送到CAN总线上;接收过程是:CAN控制器从CAN总线上自动接收数据,并经过滤后存入CAN接收缓冲区,且向单片机发出中断请求,此时单片机可从CAN挡收缓冲区读要接收的数据。
2.1.2 系统节点的硬件设计举例
图2是所研制的低成本农业温度控制系统中与本文相关部分的硬件电路图。









