
今天小编要和大家分享的是嵌入式技术相关信息,接下来我将从基于ATMEGAl6单片机和分级转向模块实现智能寻迹车模系统的设计,单片机c51,pic,avr;c语言培训,或代设计这几个方面来介绍。

嵌入式技术相关技术文章基于ATMEGAl6单片机和分级转向模块实现智能寻迹车模系统的设计
引 言
智能运输系统是未来交通运输系统发展的趋势,智能汽车在智能运输系统中扮演着十分重要的角色。作者提出智能寻迹车作为构建未来智能交通运输系统中重要部分,针对未来交通运输系统有导航线的环境命题假设下智能汽车的自主寻迹问题,提出一种基于视觉的智能寻迹车模设计方案,作为该假设问题的解决方案。
基于视觉的智能寻迹车模设计方案能够在线型复杂,转弯半径不确定性大的情况下,利用视觉自主寻迹前进,分级精确转向。
1、 系统总体设计
基于视觉的智能寻迹车模系统以AVR单片机MEGA16为核心,由单片机模块、路径识别模块、直流电机驱动模块、舵机驱动模块等组成,如图1所示。
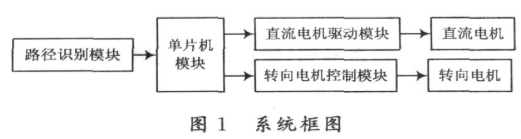
直流电动机为车辆的驱动装置,转向电动机用于控制车辆行驶方向。智能寻迹车模利用视觉在跑道上自主寻迹前进,分级精确转向。道路为318 mm宽白色底板,其中间粘贴18 mm宽且线型不断变化的黑胶带。









