
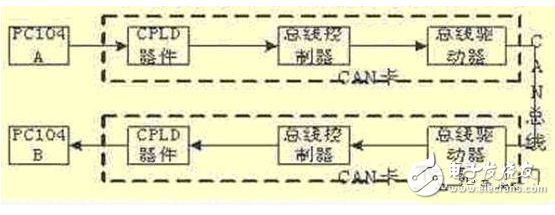
图1 系统硬件组成
本系统主要是利用主机PC(PC104)采集多个下位机从被控对象得到的数据,并进行实时控制和综合调度,其原理框图如图2所示。
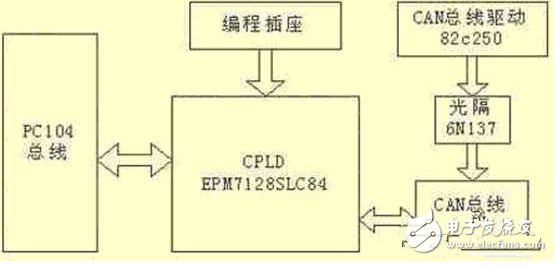
图2 原理框图
其中CPLD完成从CAN控制器到PC总线的数据转换。CAN控制器负责从总线上采集数据。总线驱动部分由89C250完成总线驱动;光电隔离器完成CAN控制器与传输电缆的信号隔离,防止电缆上的非规则信号对CAN控制器产生干扰。
3.MAX+PLUSⅡ程序设计
Altera公司的MAX+PLUS Ⅱ是一个高效实用的工具。直接采用原理图输入方式,进行编译后写入器件中;同时可在线更改写入内容,修改和调试简单易行。利用MAX+PLUS Ⅱ可以对输入输出关系进行在线调试和仿真,开发和调试周期短而高效。MAX+PLUSⅡ的软件设计的流程包括设计输入、功能仿真、编译、后仿真、编程验证几个部分。
本文所论述的系统已经实现并进行通信测试,在最高通信速度、通信距离、热冗余和冷冗余实验等测试中都取得了良好的表现。这里仅论述逻辑设计输入和功能仿真。
CPLD主要用于实现PC接口板的地址选择比较器和CAN控制器到PC总线的数据转换,其设计输入如图3所示。
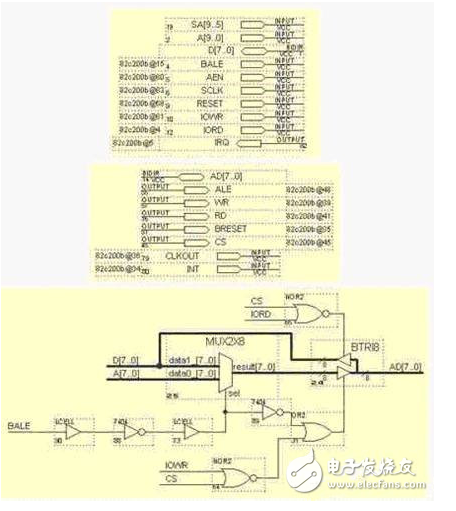
图3 设计输入
基于嵌入式系统的CAN总线网络通信流程设计
其中compare完成选址功能,MUX2×8完成总线转换。
4.仿真实验
为简明起见,这里仅给出核心的部分时序仿真图形,如图4所示。
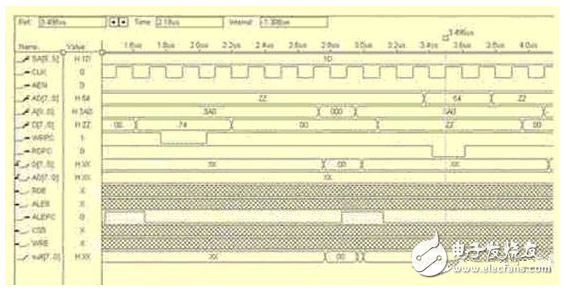
图4 核心的部分时序仿真图形
由仿真波形可知,在PC总线的读写操作进行时,地址和数据很好的实现了转换,读写的周期完整,触发迅速,保证转换的准确和迅速,满足了设计的要求。
5.结论
可编程逻辑器件的应用已经成为现代电子电路设计中的高效方式,它可以实现高效率、可靠的设计,也可以进一步提高电路的集成度;使用它设计的CAN通信卡可以作为通信接口而满足嵌入式系统的要求。同时,基于PC104系统的CAN通信的通信效率较高,具有较强的实时性,可以满足工业现场高速通信的需要,也可为复杂控制系统实现实时控制提供强有力的工具。









