
可以看出,开关频率和选择的电感、滞环环宽以及电容 ESR 都有关系。Vin 变化时,以及 ESR 会受到温度的影响而变化,比较器的传播延迟等,都会影响到开关频率,这会使得 EMI 的处理变得比较困难。
图 2 输出纹波电压细节
而实际上,输出电容还有 ESL 存在,ESL 带来的纹波会在输出电压纹波上形成一个小尖锋,有可能在开关状态切换的时候,导致反馈电压 vfb 会超出滞环的上限。再考虑耦合到输出纹波上的噪声,可以想象,控制器会变得非常敏感。另一方面,当输出电压较高时,其输出纹波会增大。因此,其商用的 IC 总体来说并不多。
恒定导通时间(COT)
COT 控制模式基于滞环控制模式发展而来。在基本的迟滞控制中增加一个单稳态计时电路(One Shot)控制功率管的导通时间,使功率管导通一个恒定的时间。
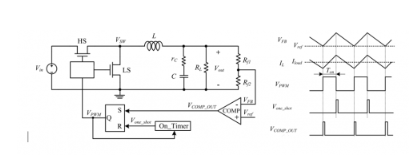
图 3 COT 控制模式
当反馈电压 vfb 低于参考电压 vref 时,比较器的输出 vcomp_out 会拉高,SR latch 被置位,Q 输出也拉高,HS 就被打开,电感电流线性上升,输出电压纹波以及 vfb 上的纹波也会上升,因此,vcomp_out 会立马拉低,形成一个脉冲。而 Q 输出拉高同时,也启动了单稳态计时器,直到这个固定开通时间结束。单稳态定时器输出 vone_shot 翻转拉高,复位 SR latch。当结束 HS 开通过程后,电感电流下降,输出电压纹波也下降,直到 vfb 再一次低于 vref,开启新的周期。
可以看出,COT 是一种纹波电压谷底控制方式。如果系统已经开通了一个 Ton 的时间,发现 vfb 仍然低于 vref,怎么办呢?从逻辑控制图中可以看出,此时 vcomp_out 会一直高电平,当 Ton 结束,Q 拉高之后,S 和 Q 均为高电平,根据 SR latch 的真值表,此时 SR 处在 invalid 状态,是不允许出现的逻辑错误。因此,可以再 Ton 结束后,增加一个最小关断时间 Toff_min,强制关断 HS,然后再进行下一次 Ton 开通。一方面增加 Toff_min 可以保证逻辑正确,另一方面也可以避免 HS 一直导通情况下的电感器的饱和。
COT 的稳定性问题:
从上面的逻辑控制图中可以发现,COT 的稳定性建立在 vfb 纹波上,也即输出电压纹波上。当输出电压纹波足够大时,可以保证足够的稳定性。因此直观地看,COT 是一种基于 power stage 大信号的非线性控制。利用环路分析仪扫描伯德图仅仅适用于电压模式、电流模式之类线性控制系统,此时对 COT 控制已经不再适用。









