
1.2单片机系统主电路
本电路主要由单片机AT89C51、键盘/显示电路、模数转换器AD574A、数模转换器DAC0832、6116存储器等构成,具体电路如图5所示(键盘/显示电路和6116存储器等图中未画出)。键盘主要用来实现移相的具体数值(度)的设置,功能键包括设置键、数字键(“↑”、“→”)、复位键、运行键等五个键,最多可置720个0(720×0.5度=360度),因此可达到0~360度的相移。根据任意设定的相位数值,把相位及数据存储到队列(如图4所示)中的相应位置置0。显示用四位数码管实现,最低位为小数位,其余3位为整数位,可显示范围为0.5~360度。
A/D实现对波形数据(幅度)的采集、转换。A/D每采集一个点,就存入存储器的队列中。同样D/A借助单片机先从队列中读入一个数据,再由倍频信号fo来控制D/A输出数据的时间间隔,D/A的第一周期输出从“输出1”口输出,以后则从“输出2”口输出,对采集的720个数据循环输出,因此达到了移相的目的。
另外,因D/AC0832模/数芯片输出的波形存在毛刺,需要进行滤波,通过实验,在其输出端加一个1000p的电容就可以使这些毛剌基本消失,得到较平滑的波形。
2系统软件设计
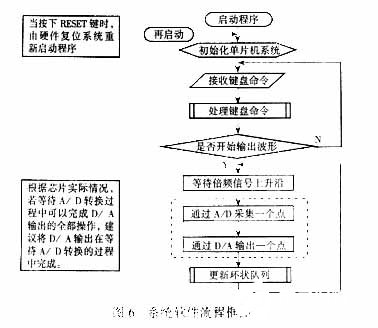
整个系统软件的执行过程为:首先,通过键盘设置移相的数值,同时在显示器上显示出移相的度数;其次,启动A/D把转换结果存入队列,在A/D的转换过程中,D/A从队列中读出相应数据后D/A输出;第三,D/A不断循环输出,实现连续的移相后的工频信号。系统软件流程框图如图6所示。
3结束语
该数字移相器可对任意波形信号(如正弦波、三角波、锯齿波、方波等波形)进行任意相位的移相,具有测量精度高、跟踪速度快的特点,根据设定要求移相后所获得的输出波形与输入信号波形的幅度、频率逼近,即输出移相后波形的失真度较小。
责任编辑;zl
关于控制,MCU就介绍完了,您有什么想法可以联系小编。









