
五。sys.h中对GPIO的输入输出部分实现了位带操作
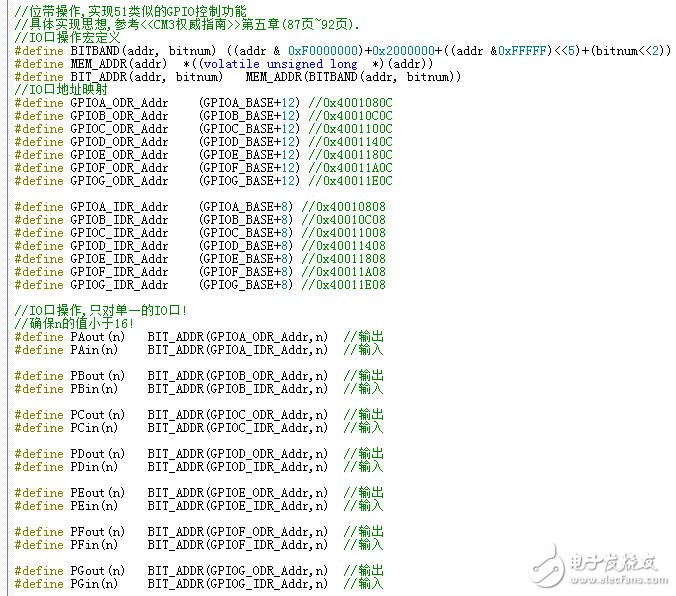
GPIOA中ODR的地址为 GPIOA的基地址+ODR的偏移地址=GPIOA_BASE+0x0C
例如 PAout输出是操作ODR寄存器,PAout(1)就是经过一系列计算算出这一位映射的地址,对这个地址进行操作
PAin输入就是操作IDR寄存器。
六。实例操作
跑马灯实验
程序编写步骤:

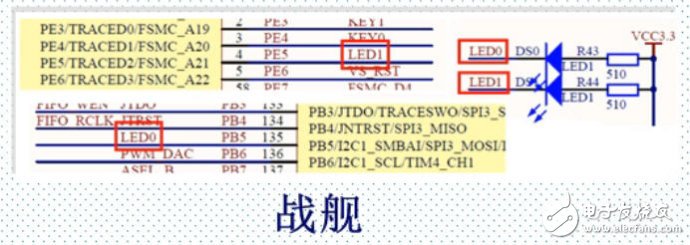
LED0接PB5,LED1接PE5
led.c文件
//初始化PB5和PE5为输出口。并使能这两个口的时钟
//LED IO初始化
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOE, ENABLE); //使能PB,PE端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED0--》PB.5 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.5
GPIO_SetBits(GPIOB,GPIO_Pin_5); //PB.5 输出高
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED1--》PE.5 端口配置, 推挽输出
GPIO_Init(GPIOE, &GPIO_InitStructure); //推挽输出 ,IO口速度为50MHz
GPIO_SetBits(GPIOE,GPIO_Pin_5); //PE.5 输出高
}
主函数
#include “stm32f10x.h”
#include “delay.h”
#include “led.h”
int main(void)
{
delay_init();
LED_Init();
while(1)
{
PBout(5)= 1; //采用位带操作PB.5引脚
PEout(5)= 1;
delay_ms(500);
PBout(5)= 0; //采用位带操作PB.5引脚
PEout(5)= 0;
delay_ms(500);
}
}
来源;21ic
关于控制,MCU就介绍完了,您有什么想法可以联系小编。









