

式中,u(t)为控制器的输出;e(t)为偏差,即设定值与反馈值之差;Kc 为控制器的放大系数,即比例增益;Ti 为控制器的积分常数;Td 为控制器的微分时间常数。PID 算法的原理即调节Kc、Ti、Td 三个参数,使系统达到稳定。
由于PID 的一般算式不易与单片机处理,因此,在设计中采用了增量型PID 算法。将式(1)转换成:
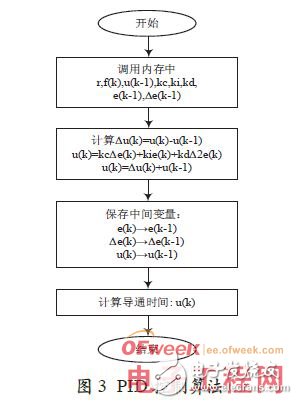
式(3)中的u(k) 即输出PWM 波的导通时间。其控制算法如图3 所示。
4 测试方法与测试结果
4.1 测试方法
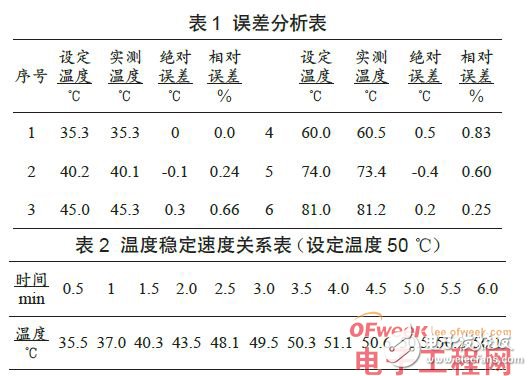
在电炉子中放入1 L 清水,电炉子和控制系统相连,给系统上电,系统进入准备工作状态。分别设定温度为35.3 ℃、40.2 ℃、45 ℃、60 ℃、74.0 ℃、81 ℃,观察设定温度和实际温度,并记录数据。填写表1,同时观察水温变化的动态情况,并记录温度稳定的时间,填写表2.
4.2 测试结果
设定温度与实测温度的数据对比如表1 所列。表2 所列是温度稳定和时间的关系,表2 中的设定温度为50℃,每隔30 s 记录实测温度。
5 结 论
从表1 中的数据可知,系统的误差基本稳定在±0.3 ℃,因而能很好地满足系统的设计要求。从表2 所得的数据可知,系统运行5 min 时,基本达到了稳定,说明系统能很好地控制温度达到理想值,为需要精确控制温度的任务提供了参考。同时,系统实现了PC 机与单片机的通信,把控制参数和控制结果显示PC 机上,方便监控,实现了温度的控制和智能监控。
来源;21ic
关于控制,MCU就介绍完了,您有什么想法可以联系小编。









