
5、总结
看到小车比赛的视频或是现场的比赛,勾起了儿时的美好回忆,兴起了自己动手制作智能巡迹小车的念头。曾经还认为小车的硬件部分应该是比较简单的,通过自己的实践才明白,从小车的整体构思设计到每个零件的设计和加工,都蕴含了机械设计的各项原则,满足性能要求,经济、可靠、外形美观的诸多限制。
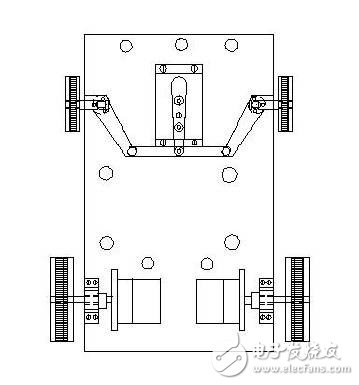
在小车转向方面,我们认真研究了阿克曼原理并查阅了相关的资料最终采用解析法确定了平面等腰梯形四双摇杆机构,实现了小车转向时灵敏、准确,纯滚动无滑动的完美结构。
电路方面,我们的收获也很大。不仅锻炼了自己在电路板焊接、测试方面的能力,包括了检查错误,改正错误的能力;还学习了单片机的有关知识,这其中包括了直流电机、舵机、红外巡线等方面的知识。
附录:
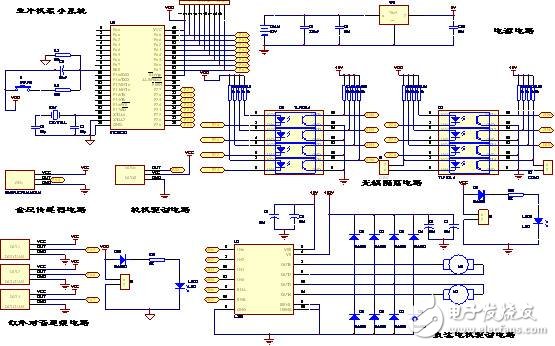
1、 总电路图
2、 机械结构总图
关于控制,MCU就介绍完了,您有什么想法可以联系小编。









