
今天小编要和大家分享的是接口,总线,驱动相关信息,接下来我将从如何利用CAN现场总线实现时间信息提取电路和无线发送结构的设计,机器设备 1356_757这几个方面来介绍。

接口,总线,驱动相关技术文章如何利用CAN现场总线实现时间信息提取电路和无线发送结构的设计
电子时间引信系统从火控计算单元提取的射弹飞行时间数据需要实时可靠地传送给编程装置,为保证时间信息传送的准确、及时,本文采用CAN总线进行时间信息的传输。
CAN 总线具有突出的可靠性和实时性,适合在复杂的战场环境下工作,基于CAN现场总线的时间信息数据接口,可充分保证时间信息的传送,并为电子时间引信系统提供标准的数据接口,便于应用在其它防空武器系统的嵌入式改造或未来数字化防空武器系统中。本文阐述了CAN现场总线、总线接口技术、时间信息提取电路结构、信息无线发送结构等原理,及如何利用CAN现场总线技术实现时间信息共享技术。
CAN现场总线概述
CAN(Controller Area Network)总线诞生和发展于汽车工业自动控制领域,是两线制“多主对等”总线型拓扑网络,能有效地支持具有很高安全等级的分布实时控制,是唯一有国际标准的现场总线(Field Bus),目前发展到CAN2.0B规范,应用范围极为广泛。
CAN总线用“显性”和“隐性”两个互补的逻辑值表示“0”和“1”,总线接口上同时发送显性和隐性位时,总线值是显性,实现逻辑与。根据ISO/OSI参考模型,CAN的层次划分为:数据链路层,包括逻辑链路控制子层和介质访问控制子层;物理层。
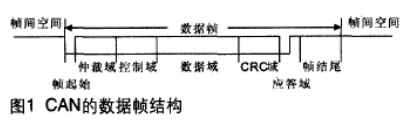
CAN 总线信息的报文传输有数据帧、远程帧、错误帧和过载帧四种不同类型的帧,数据帧和远程帧可以使用标准帧和扩展帧2种不同格式,标识符域的长度分别为11位和29位。CAN的帧由不同的位域组成,以数据帧为例,它包括7个不同的位域:帧起始、仲裁域、控制域、数据域、CRC域、应答域和帧结尾,如图1所示。
为获得安全的数据发送,CAN总线采取错误检测和处理的措施,在报文传输过程中设有位错误、填充错误、CRC错误、格式错误和应答错误5种错误类型,对于故障的界定有“错误激活”、“错误认可”和“总线关闭”3种状态。









