
(5)内置电源。USB总线内置电源线,可以给外设提供5V和最多500mA的电源供应,满足大部分低功耗外设的电源要求。
由于USB具有这些突出的优点,不但一些传统外设开始提供USB接口,而且大量新型外设也把USB接口作为首先甚至唯一的接口,如MP3播放器、移动硬盘等。由于USB的高可靠性和足够快的通信速率,USB开始应用于工业级的实时通信和控制,例如机器人系统中示教盒与控制器的通信。本文论述的用USB端口实现机器人上位机与下位机的通信也属于这些方面的应用。
2、 用USB实现计算机双机通信
由于USB模型是一种Host-Slave(主机-外设)主从式结构,没有办法使两台主机不通过外设而直接通过USB总线通信。然而可通过增加外设控制器的方法使两台主机利用它们的USB端口通信。每个外设控制器连接到不同的主要,并利用共享的缓冲器交换数据。Cypress公司的EZ-Link和Prolific公司的PL-2301把两个外设控制器和共享缓冲区集成到一块芯片上,作为两台主机通过USB总线通俗诉桥梁。其它公司也提供类似的控制芯片。在教学机器人中,采用PL-2301。
PL-2301是台湾Prolific公司生产的一种全速USB控制芯片。PL-2301的结构框图如图1所示。
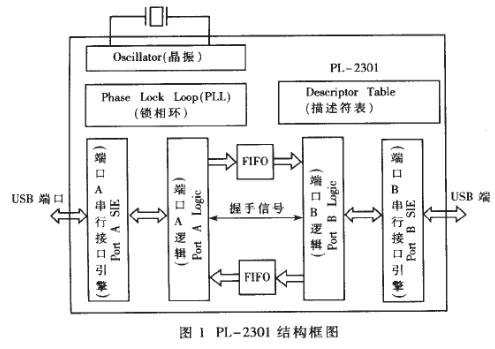
PL-2301包括两套独立的USB控制单元。在握手信号的协调下,它们通过两个FIFO缓冲器无阻塞地交换数据。PL-2301包含四个终端:缺省的控制终端(地址00H)、中断终端(地址81H)、块输出终端(地址02H)、块输入终端(地址83H)。控制传输用于在主机列举阶段完成对PL-2301的配置及在两台主机通信时控制PL-2301的握手信号;中断传输用于PL-2301定期(每毫秒一次)向主机报告握手信号的状态;块传输用于两台主机之间实时地交换数据。块传输支持错误检测,这对实时通信和控制很重要。控制传输被确保拥有10%的USB总线带宽,中断传输和等时传输最多可以使用90%的带宽,块传输使用剩余的最大可用带宽(最多95%)。当总线不太忙时,由于块传输只有一个很小的协议头(13字节),它是所有传输类型中最快的。为了确何教学机器人上下位机以最快的速度通信,满足实时性要求,最好不要在USB总线上挂接过多的USB外设。
PL-2301除了能对USB标准请求做出反应外,还能对几种厂商自定义的请求做出反应。自定义请求ClearQuickLinkFeature和SetQuickLinkFeature用于控制两台主机通信时PL-2301的握手信号。这些握手信号是:
(1)TX_RDY指示本地USB端口是否准备好传输数据的指示信号。









