今天小编要和大家分享的是接口,总线,驱动相关信息,接下来我将从CAN-bus的基本原理、主要特性及在门禁系统中的应用,汽车电子与汽车can总线网络实验开发系统商品大图这几个方面来介绍。

接口,总线,驱动相关技术文章CAN-bus的基本原理、主要特性及在门禁系统中的应用
CAN_bus总线简介
CAN-bus(ControllerAreaNetwork)即控制器局域网,是国际上应用最广泛的现场总线之一。起先,CAN-bus被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络。比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN控制装置。由于其技术先进、可靠性高、功能完善、成本合理,CAN_busCAN-bus已被广泛应用到各个自动化控制系统中。例如,在汽车电子、自动控制、智能大厦、电力系统、安防监控等各领域。
CAN-bus是一种多主方式的串行通讯总线,具有高的位速率,高抗电磁干扰性,而且能够检测出产生的任何错误。当信号传输距离达到10Km时,CAN-bus仍可提供高达5Kbps的数据传输速率。
CAN总线电平定义和通讯距离
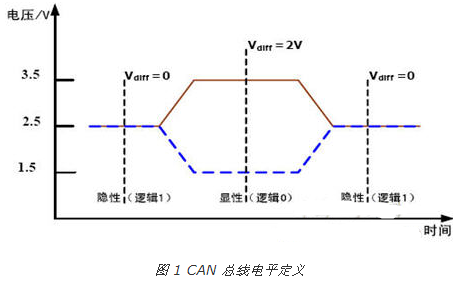
CAN总线采用两种互补的逻辑数值“显性”和“隐性”。“显性”(“Daminant”)数值表示逻辑“0”,而“隐性”(“Recessive”)表示逻辑“1”。当总线上同时出现“显性”位和“隐性”位时,最终呈现在总线上的是“显性”位。CAN_H和CAN_L表示CAN总线收发器与总线的两接口引脚,信号是以两线之间的“差分”电压Vdiff形式出现。
在“隐性”状态下,VCAN_H和VCAN_L被固定与平均电压电平,Vdiff近似为零,此时VCAN_H和VCAN_L的标称值为2.5V。“显性”位以大于最小阀值的差分电压表示,此时VCAN_H的标称值为3.5V,VCAN_L的标称值为1.5V。如图1所示。在总线空闲状态,发送隐性位。
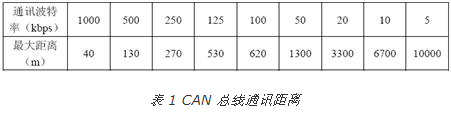
CAN总线上任意两个节点之间的最大传输距离与其通讯波特率有关,如表1所示。