
通过实验测得在125kbps位速率下连续发送不同报文长度的总线切换时间如表1所示:
表1 总线切换时间
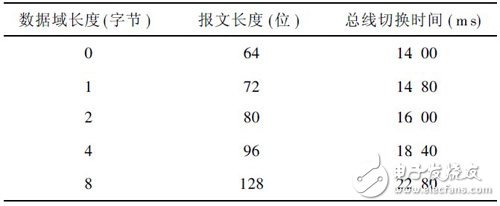
在125kbps位速率下切换时间为22. 80ms, 比理论计算值稍长, 这是由总线切换时运行冗余算法及读取控制器错误寄存器( ESR)所额外消耗的, 但在实际应用中, 发送报文获取仲裁所需的等待时间远大于切换时间, 总线故障并不频繁发生, 冗余切换算法对系统的运行并无显着影响。
4 结束语
与传统单片机总线外扩两片CAN 控制器的冗余方案相比, 本设计充分利用STM32F105微控制器内置的两路CAN 控制器, 简化电路设计, 相对降低了成本, 同时双CAN 冗余通信系统的采用提高了系统整体可靠性。所使用双总线负载均衡技术, 可以提高总线带宽, 平衡通信负荷。系统船舶机舱监控系统的图像和数据信号的传输中取得很好的效果。
来源;电子工程网
关于接口,总线,驱动就介绍完了,您有什么想法可以联系小编。









