
今天小编要和大家分享的是接口,总线,驱动相关信息,接下来我将从基于CAN总线的运动控制系统设计,领域驱动设计与模型驱动开发ppt这几个方面来介绍。

接口,总线,驱动相关技术文章基于CAN总线的运动控制系统设计
1 总体设计
主节点采用ARM7内核的LPC2294微控制器,使用RTL8019AS作为以太网控制器,软件上采用具有网络功能强、性能稳定、移植性好的μCLi nux作为操作系统。基于CAN总线的运动控制系统,主要由1个主节点(主控制器节点)、若干个从节点(电机控制节点)以及1台计算机构成,主节点与从节点之间通过CAN总线进行通信,主节点与计算机之间则通过以太网进行通信,如图1所示。
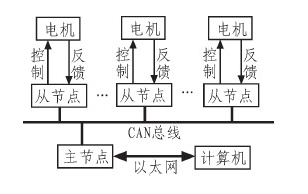
图1 运动系统控制结构
主节点主要功能包括:1)通过CAN总线发送电机控制信息给从节点,并接收各从节点的反馈信息:2)通过以太网与计算机监控端进行通信,以实现远程监控。
1.1 整体硬件设计
主节点整体硬件结构如图2所示。
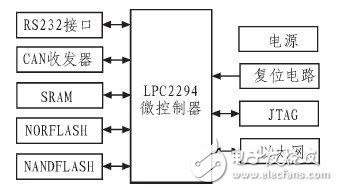
图2 硬件结构
主节点采用的LPC2294基于ARM7TDMI内核的32位处理器,带有256kB高速FLASH、16kB静态RAM,内部集成4路CAN控制器,支持SRAM、FALSH扩展。由于LPC2294内部集成CAN,因此外部只需CAN收发器与之连接。CAN收发器选用周立功的CTMl050T.CTM1050T是一款带隔离的高速CAN收发器,主要功能是将CAN控制器的逻辑电平转换为CAN总线的差分电平,并具有隔离功能(DC2500 V)、ESD保护功能及TVS管防总线过压功能。 LPC2294具有外部存储器控制器(EMC),通过该部件可以扩展更多的FLASH和SRAM以及以太网、USB等外设。主节点采用RTL8019AS作为以太网控制器,分别使用MT45W4MW16、SST39VF1601、K9F2G08UOA进行SRAM、NORFLASH、NANDFLASH的扩展。
1.2 软件结构
主节点软件结构如图3所示,U-Boot作为BootLoader(启动引导程序),负责初始化目标板硬件与引导操作系统。这里采用μCLinux作为嵌入式操作系统。μCLinux(microcontrol linux)即“微控制器领域中的Linux系统”,主要是针对目标处理器没有存储管理单元(MMU)的嵌入式系统而设计的。它保留了Linux的大多数优点:稳定、良好的移植性、优秀的网络功能、对各种文件系统完备的支持和标准丰富的API.同时μCLinux包含大量的设备驱动程序,以及提供良好的驱动程序开发框架。驱动程序开发或配置主要包括CAN、以太网以及NANDFLASH3大部分。上层应用程序通过使用CAN接口函数、Socket接口以及库函数进行各种应用开发。整个系统的启动过程是:U-Boot把μCLinux内核从NORFLASH中加载到SRAM中,然后启动μCLinux,μCLinux初始化硬件及建立运行环境后,自动运行预设的应用程序。









