
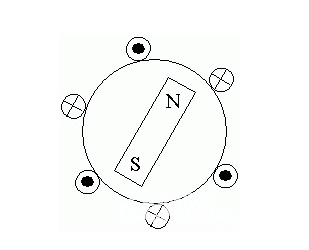
图1 三相永磁同步电机的简单结构模型
U、V、W 为定子上的3 个线圈绕组,3 个线圈绕组的轴线成 120°。电机单相绕组通电的时候,稳态转矩可以表达为:T=f(i,theta) 。其中,i 为绕组中通过的电流;theta为电机转子偏离参考点的角度。
即:T=k *I*sin(theta),k 为转矩常数
若理想的电流源以恒幅值为I,即:
iU=I*sin(wt)
iV=I*sin(wt+2*PI/3)
iW =I*sin(wt+4*PI/3)
则电机各相电流产生的稳态转矩为:
TU=k*I*sin(wt)*sin(theta)
TV=k*I*sin(wt+2*PI/3)*sin(theta+2*PI/3)
TW=k*I*sin(wt+4*PI/3)*sin(theta+4*PI/3)
稳态运行时,theta=wt,则三相绕组产生的合成转矩为:
T=TU+TV+TW=3/2*k*I*sin(PI/2-wt+theta)=3/2*k*I
以上分析表明,对于三相永磁同步电机,当三相绕组输入相差 120°的正弦电流时,由于在内部产生圆形旋转磁场,电机的输出转矩为恒值。因此,将交流伺服控制原理应用到三相混合式步进电机驱动系统中,输入的220V 交流,经整流后变为直流,再经脉宽调制技术变为三路阶梯式正弦波形电流,它们按固定时序分别流过三路绕组,通过改变驱动器输出正弦电流的频率来改变电机转速,输出的阶梯数确定了每步转过的角度,当角度越小的时候,其阶梯数就越多。当然,步进电机转动时,电机各相绕组的电感将形成一个反向电动势,频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
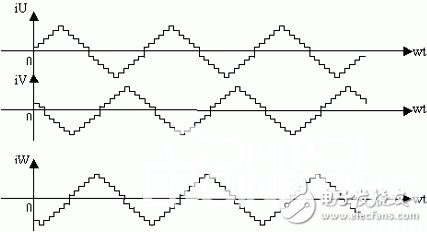
图2 给出相差120°的三相阶梯式正弦电流
三相混合式步进电机一般把三相绕组连接成星形或者三角形,按照电路基本定理,三相电流之和为零。即IU+IV+IW =0 。所以通常只需产生两相绕组的给定信号,第三相绕组的给定信号可由其它两相求得。同样,只需要对相应两相绕组的实际电流进行采样,第三相绕组的实际电流可根据式求得。
3 三相混合式步进电机驱动器的系统构成
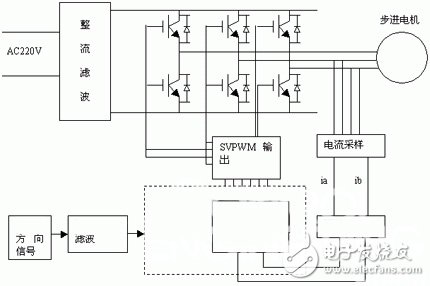
图3 驱动器的整体框图
3.1 DSP模块设计
在这里,我们选择了TI公司的DSP作为CPU芯片,DSP(Digital Signal Processor)是一种通过使用数学技巧执行转换或提取信息,来处理现实信号的方法,这些信号由数字序列表示。本文选用的DSP(TMS320LF2407A)是一款电机控制专用芯片,144引脚,具有丰富的IO资源,含有四个通用定时器,具有两路专用于控制三相电机的PWM发生器,另外还有专用接收外部脉冲和方向的I/O口。









