
今天小编要和大家分享的是接口,总线,驱动相关信息,接下来我将从CAN总线抗干扰的方法有哪些,供应电动玩具车驱动线(图)这几个方面来介绍。

接口,总线,驱动相关技术文章CAN总线抗干扰的方法有哪些
CAN总线虽然有强大的抗干扰和纠错重发机制,但目前CAN被大量应用于比如新能源汽车、轨道交通、医疗、煤矿、电机驱动等行业,而这些场合的电磁环境比较严重,所以如何抗干扰是工程师最为关心的话题。
前段时间有个做模台流水线的用户,一条流水线有两路CAN总线,一条总线有22个控制节点,每当启动模台就会出现严重的失控状态,模台下是由很多电机驱动的,而操控台下放着变频器。使用CANScope测试发现,在未启动电机情况下,控制台的CAN通信正常,帧统计结果显示100%成功率,如图1所示。
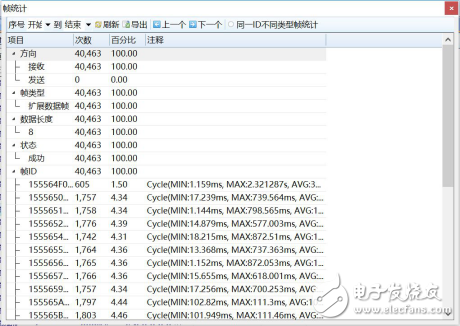
图1 模台静态状态下帧统计
此时CAN波形图如图2所示。
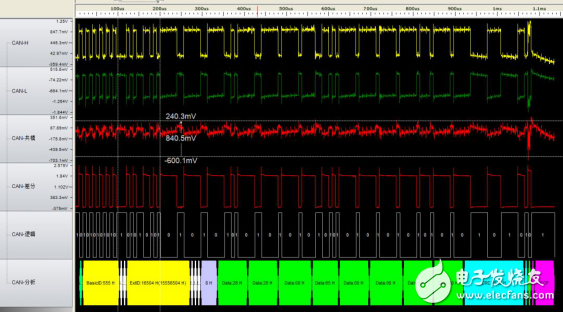
图2 模台静态状态下波形图
然而当模台电机启动之后,CAN总线质量急剧下滑,使用CANScope帧统计结果显示成功率仅仅为16.33%,如图3所示。
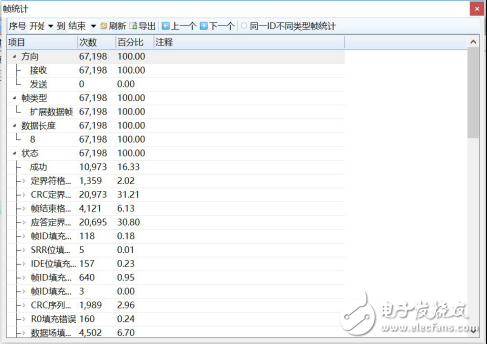
图3 模台动态态状态下帧统计
此时的CAN波形图如图4所示,可见干扰导致波形严重畸变。

图4 模台动态态状态下波形图
干扰导致帧错误增加,重发频繁,正确数据不能及时到达。所以如何解决干扰带来的困扰呢,下面就为大家介绍CAN总线抗干扰的六大解决方案。
一、增加CAN接口电气隔离
干扰不但影响信号,更严重的会导致板子死机或者烧毁,所以接口和电源的隔离是抗干扰的第一步。隔离的主要目的是:避免地回流烧毁电路板和限制干扰的幅度。如图5所示,未隔离时,两个节点的地电位不一致,导致有回流电流,产生共模信号,CAN的抗共模干扰能力是-12~7V,超过这个差值则出现错误,如果共模差超过±36V,烧毁收发器或者电路板。









