
今天小编要和大家分享的是接口,总线,驱动相关信息,接下来我将从电子驻车制动系统的CAN总线通讯电路设计,can总线系统智能节点硬件电路这几个方面来介绍。

接口,总线,驱动相关技术文章电子驻车制动系统的CAN总线通讯电路设计
电子驻车制动系统(EPB)指将行车过程中的临时性制动和停车后的长时性制动功能整合在一起,并且由电子控制方式实现停车制动的技术。为了能够获取各车辆已施加的理论驻车压力,并监控各车辆一体化执行机构的工作状态,防止驻车电机长时间工作在大电流状态,防止驻车电机过热烧毀,EPB一般配有驻车车电流采集节点,并通过CAN总线将驻车电流发送给中央控制节点(ECU)。文中主要介绍了基于AD574A的驻车电流采集节点的接口设置、采集方法及软件设计。
1系统硬件设计
驻车电流采集节点的硬件电路设计包括CAN总线通讯电路设计与车速采集电路设计两部分,如图1所示。
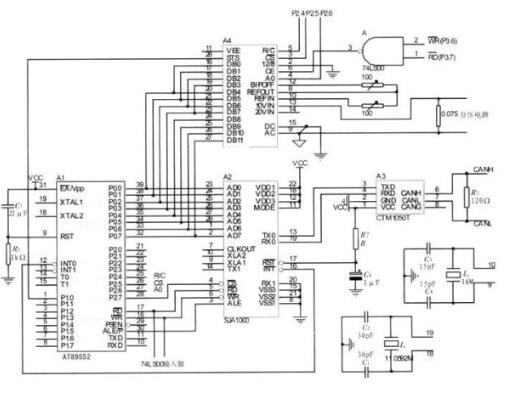
图1系统硬件接口原理图
1)CAN总线通讯电路设计
CAN总线通讯电路设计时,CAN控制器使用由广州致远电子有限公司出品的CTM1050T,微控制器使用AT89S52。
2)电流采集硬件设计
电流采样通过AD574A进行,该芯片是美国AD公司生产的12位高速逐次逼近型模/数变换器,非常适合高精度快速采样系统的使用。对于驻车电流的采集,考虑到为了控制电机转动方向,驻车电流的方向可变,故利用AD574A双极性输入,分为8位和4位两次输出。AD574A的信号组合功能如表1所示。
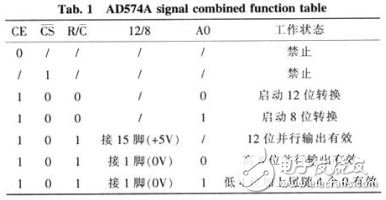
表1AD574A的信号组合功能
根据AD574A的信号组合功能表,AD574A有两个选口地址,由A0区分。如图1所示,对外部地址0x8fff写操作可启动12位A/D转换,而读0x9fff地址可读得高8位数字量输出,读地址0xdfff则可读取低4位的数字量输出。被测信号则由13及9脚引入。在电路的连接过程中,模拟地与数字地即9及15脚必须共地,否则不能完成转换。与AD574A的第12脚和10脚连接的两个100欧的电位计分别用于调整芯片的零点和满量程,首先令输入电压也应为-5V,此时调节芯片12脚所接电位计R2,使转换后输出数字量在0000H~0001H间跳动;然后令输入电压为+5V,此时调节芯片10脚所接电位计R1并测量分压电阻两端的电压,使转换后输出的数字量在0FFEH~0PPFH之间跳动。在设计硬件电路时要十分注意的一点就是AD574A的数据输出线与单片机数据总线的连接方式应将高8位DB4到B11接到数据总线的D0到D7,而低4位DB0到DB3接到数据总线的高4位D4到D7。如果接错的话就不能读取正确的转换结果,而且还很容易烧坏芯片。









