
2.3 设计目标
2.3.1 远程控制
本设计主要实现远程对实验室的监测与控制,同时该设计也兼容本地控制管理操作。由于PIC32具有丰富的片内资源,可利用系统以太网host实现便捷的以太网通讯,远程PC机可直接管理系统运行。以实验室平台模型为例,当用户(老师)需要打开实验室时,可直接通过远程PC机下达指令,以以太网为媒介进行通讯,当MCU接收到用户发出的指令后,按照具体要求通过CAN总线来传输控制信号,门禁系统识别相应的信息后即可开启实验室大门。
2.3.2 本地实时监测
本设计可实现对整个实验室环境的整体监测。当设备正常工作后,各个模块通过CAN总线每隔一段时间向MCU发送状态报告,MCU根据收到的反馈信息做出相应的决策,并向相应设备发出下一步的命令,如此反复即可实现对整个实验平台的智能化管理。
系统的结构图
整个系统以PIC32为核心,采用以太网实现和外界的通信,系统内部采用CAN总线连接。
该系统结构框图如下图所示:
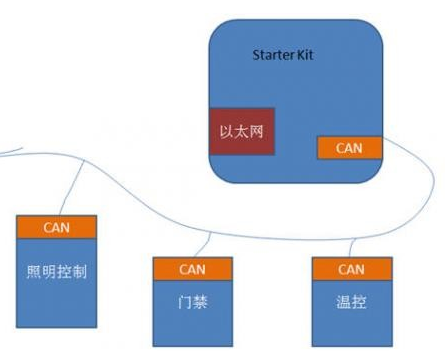
图1 系统结构图A
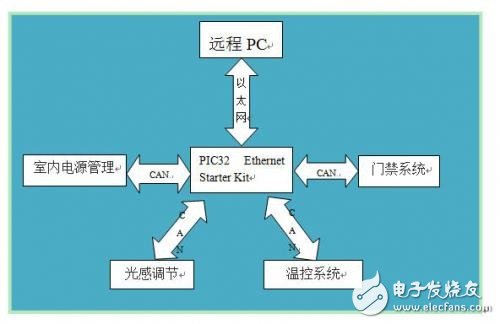
图2 系统结构图B
该系统软件设计采用基于事件触发的设计原则:
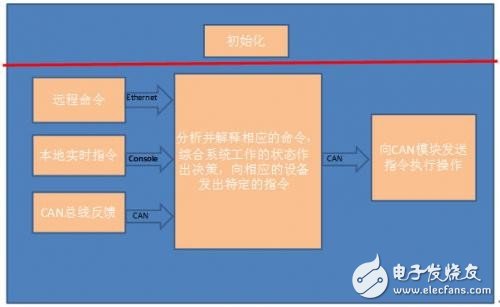
图3 系统软件流程图A
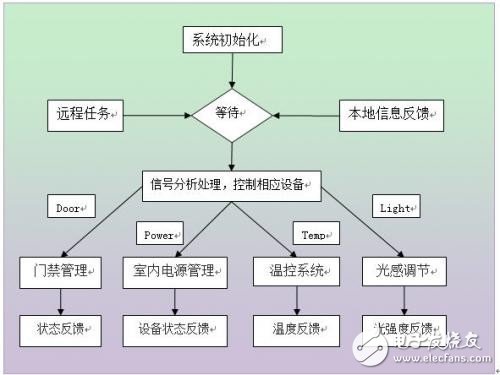
图4 系统软件流程图B
关于接口,总线,驱动就介绍完了,您有什么想法可以联系小编。









