
1.信号发射/接收单元
压控振荡器(VCO)在DSP编码产生的三角波电压控制下,产生调频连续波信号经天线向外辐射。由于本系统利用雷达回波信号来测量距离和速度,对发射信号的频率稳定性和线性度要求很高,因此采用集成微波组件作为发射/接收单元。回波信号与发射波信号进行混频,得到中频差拍信号并输出。
2.回波信号放大、滤波单元
由于发射/接收单元的发射功率较小,当信号在空中传播时,能量减弱的很快,到达目标并反射的雷达回波信号功率非常小,需要进行足够的放大才能进行后续处理。因此回波信号先经过高增益对数放大器进行放大,再经过隔离、滤波、放大后送至A/D转换器。
3.A/D转换单元
DSP系统只能对数字信号进行处理。因此,要对模拟信号进行A/D转换,即在规定的时间内把模拟信号在时刻t的幅度值转为一个相应的数据,再把数据送到DSP进行处理。
4.DSP模块
1)DSP产生调制信号使VCO工作,产生调频连续波信号向外辐射。调制信号是一系列三角波。如图3所示:
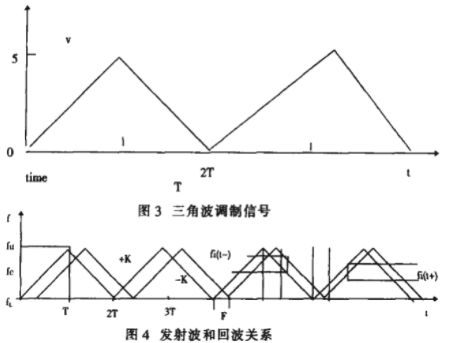
上图表示的是理想的三角波,最大幅度是5V,周期为1000μS。但是实际直线性并不理想,可以采用一些平滑的方法来改善调制信号的直线性。
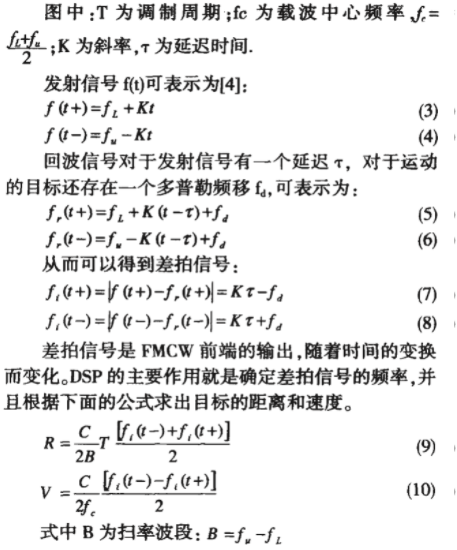
2)VCO经调制向外发射的是一系列三角波,回波信号也是三角波,两者关系如图4所示:
3)确定信号的频率及对信号进行频谱分析。信号的频谱分析主要有FFT法和非FFT法,所谓FFT法,就是对被分析的信号进行傅立叶变换,将其从时域变换到频域,在频域进行分析,必要时再通过傅立叶逆变换,变回时域的分析方法。而非FFT变换方法则是通过其他的途径,获得信号的频率参数,如最大熵法,各有特点。综合考虑方法的实时性,复杂性,稳定性,对于汽车雷达而言,应首选FFT法,而且对于DSP来说,FFT法比较成熟,更容易实现。
4)DSP通过控制步进电机来控制天线的扫描,从而可以得到障碍物相对于雷达的方位信息。天线的扫描不是360度,而是根据给定的角度,不停的从左到右,再从右到左不断循环。
DSP通过一个方波信号来控制扫描方向,方波信号是高电平的时候从左向右扫描,低电平的时候从右向左扫描。而DSP通过另一个有延迟的方波信号来确定天线扫描的位置,高电平表示在右边区域,低电平表示在左边区域。
5.显示报警模块









