
这里去幻影是流水处理,为了处理方便将此算法放在FPGA内处理。
2.1.5 S通道处理
S通道经过边沿检测,报头检测,计算参考值,DF认证,重触发,参数提取模块完成S模式应答信号的检测与提取[6-7]。
S 模式信号报头为8 μs,并且数据可长达112 μs,提取电路相对复杂。这里采用移位寄存器来提取码值。即检测到有效报头后,等数据脉冲部分到来后,再启动数据提取,将数据逐次打入。
2.2 编码主要流程及功能
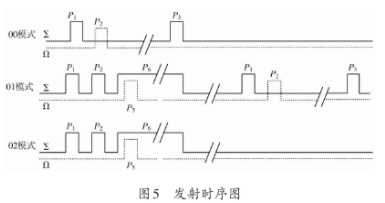
信号处理机还须进行编码发射时序处理,发射时序如图5 所示。根据图3 流程,航迹计算机来配置每一SCAN 的发射模式及参数表。信号处理机来顺序读取每个脉冲的模式及相应参数,并据此来控制发射波形。
这里模式仅分为三种,分别是00、01、02.如图5所示,00 模式是AC 模式,即AC 交替模式,用于发射AC码。01 模式是S 和AC 联合全呼叫模式,这样装有S 模式和只装AC 模式的飞机都能应答。02 模式是点名呼叫模式,这样地址一致的S模式飞机才响应并应答。
2.3 点迹处理
信号处理机同时完成点迹处理,即将飞机的多个应答处理为一个点迹报告,并传送到航迹计算机,这部分任务由DSP完成。
点迹处理处理分点迹相关和点迹凝聚的两个过程。其中点迹相关的基本流程如图6所示。
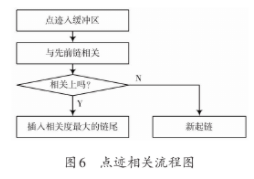
相关上的点迹形成一个链,码值的凝聚则根据链上所有应答的置信度来凝聚码值,生成距离、方位、点迹质量、紧急/识别标注等,然后生成点迹报告送至航迹计算机。
3 结论
本系统采用FPGA+DSP的方式设计、实现了单脉冲二次监视雷达实时信号处理机,结构清晰简单,功能强大,成本相对较低。经测试SSR信号处理机,可以达到≤15 m级的距离分辨率。并且根据二次雷达设备规范[8],每个SCAN 可以达到约600个目标,或每个扇区可处理64批目标,检测概率大于99%,测角精度优于0.05°。同时系统有BIT 功能,可以离线或在线检测,可靠性很高。另外,系统简单扩展既可以实现1、2、B、D、IFF等功能。综上所述,本二次雷达信号处理机具有较高的性价比,市场前景广阔。
责任编辑:gt
关于处理器,DSP就介绍完了,您有什么想法可以联系小编。









