
在工业或医疗室内环境中,没有GPS信号,却存在机械、电子方式引起的磁干扰,设计人员必须建立较为新颖的机械导航方法。很多新兴应用(如手术工具导航)所需的精度水平大大高于汽车导航等要求。在这些情况下,可选用惯性传感器,此类传感器可在视线遮挡或存在对非惯性传感器有不利影响的其它干扰源时,提供保持精度所需的航位推算导航。
图3显示了一种通用惯性导航系统(INS),可用于车辆、飞机、手术工具等任何设备的导航。INS型号中包含了一个卡尔曼滤波器,该滤波器在阿波罗登月计划中首次使用,目前广泛应用于移动通信中的锁相环。它提供的机制可合并多个有优点、但并不完美的传感器,从而最有效地估算出位置、方向和整体运动动力学特性。
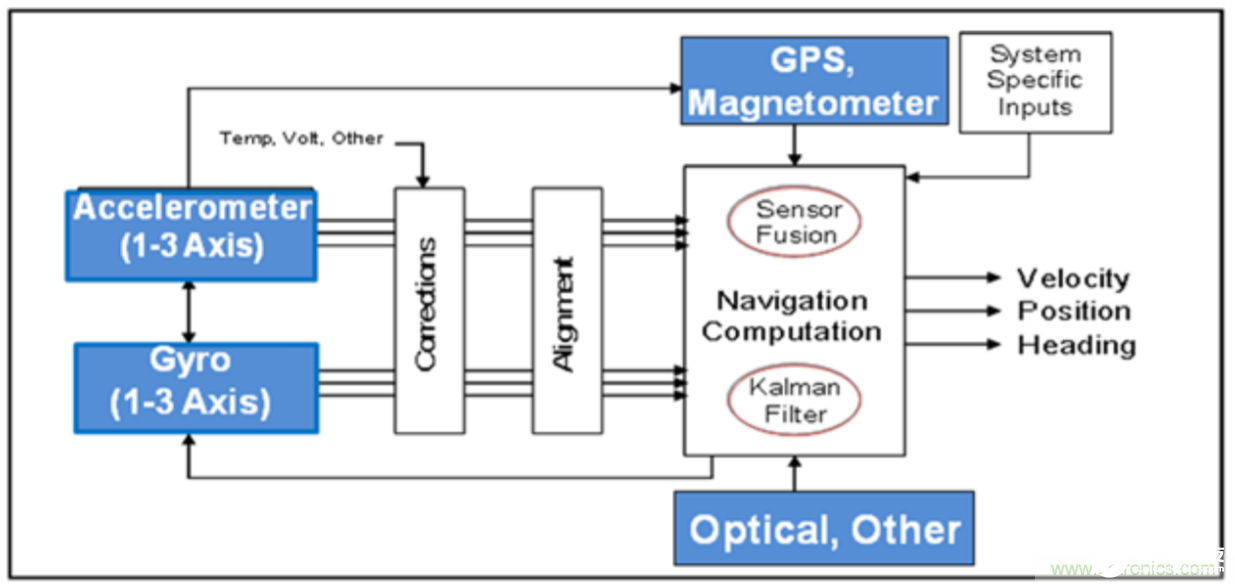
图3. 惯性导航系统,在卡尔曼滤波器的辅助下合并多种类型的传感器
在手术应用中,INS可用作导航辅助设备,以根据病人的独特身体特征,将人造关节(例如膝关节或髋关节)进行对准。除了改善对准效率以提高舒适度,并实现更快、更无创的手术之外,使用正确的传感器还有助于防止手颤、减轻疲劳。近年来,光学对准已成为了纯机械对准的补充手段,然而,就和车辆导航中的GPS遮挡问题一样,手术室中也有潜在的视线遮挡问题,会限制光学传感器的精度。惯性导航的手术对准工具不存在视线问题,同时还在尺寸、成本、自动化方面具有潜在优势,因此可为光学导航提供补充,甚至取而代之。
虽然解决导航问题的基本原理在不同应用中都是一致的,但必须充分了解终端系统的具体特性。这些特性最终会影响合适的传感器类型的选择,还会影响整体性能。
在消费应用强烈追求小尺寸、低功耗、多轴惯性传感器的同时,某些传感器开发人员同样高度重视可用于各种条件下的高精度、低功耗、高性能紧凑型传感器。这些高精度、环境适应能力极强的传感器正在不断发展,这一趋势在工业、仪器、医疗市场掀起了新一轮的MEMS惯性传感器应用浪潮。
关于MEMS,传感技术就介绍完了,您有什么想法可以联系小编。









