
今天小编要和大家分享的是MEMS,传感技术相关信息,接下来我将从基于3D深度传感ToF技术的基本原理解析,深度传感器这几个方面来介绍。

MEMS,传感技术相关技术文章基于3D深度传感ToF技术的基本原理解析
飞行时间(ToF)相机凭借更小的外形尺寸、更宽的动态感测范围,以及在多种环境下工作的能力,成为首选的深度传感方法。虽然ToF技术已在科学和军事领域应用多年,但随着21世纪初图像传感技术的进步,才得到更加普遍的应用。性能的变革意味着,包括 ADI ToF 技术在内的探测技术,已被应用到智能手机、消费电子和游戏设备中,未来将不仅限于消费市场。随着技术的进一步成熟,将有机会利用主流制造工艺从设计、制造和货物运输等多方面来提高系统效率。
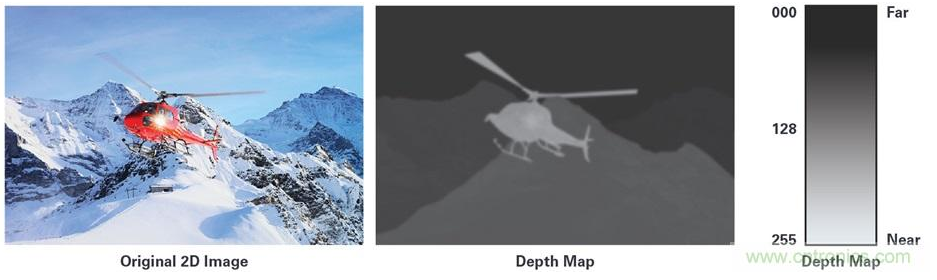
图1. 飞行时间(ToF):一项检测到物体的距离的技术。
物流、质检、导航、机器人、人脸识别、安保、监控、安全、医疗健康和驾驶员监控,所有这些应用都有机会使用3D深度传感ToF技术,从而来解决许多传统2D技术无能为力的问题。高分辨率深度数据与强大的分类算法以及AI相结合,将会解锁许多新的应用方向。
本文将探讨ToF深度传感的基本原理和两种主要的方法,并与其他常用的深度测量技术进行比较。然后,详细介绍ADI公司的3D 深度传感ToF技术的核心—— ADDI9036 模拟前端,这是一个完整的ToF信号处理器件,集成了深度处理器,将来自VGA CCD 传感器的原始图像数据处理成深度/像素数据。我们还将讨论ADI如何通过硬件合作伙伴生态系统,将这项技术扩展到我们广阔的市场客户群。
基本的工作原理
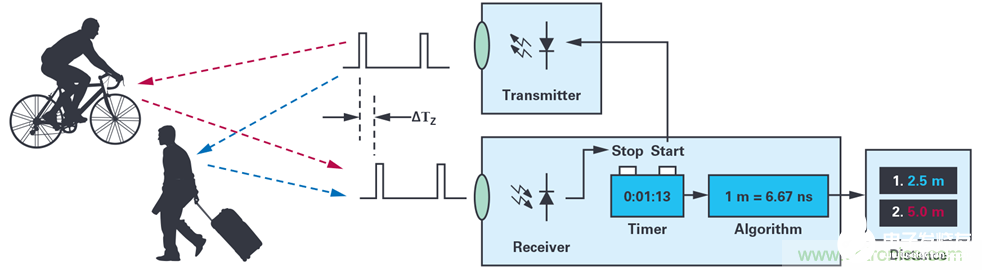
图2. 简单的飞行时间测量示意图。
ToF相机通过使用调制光源(例如激光或LED)主动照亮物体,并用对激光波长敏感的图像传感器捕捉反射光,以此测量出目标距离(图2)。传感器可以测量出发射出的激光信号经目标反射,回到相机的时间延迟∆T。该延迟与相机到目标物体间的两倍距离(往返)成正比;因此,深度可以估算为:









