
光电传感器特性
该连续化方法主要是建立在对光电传感器特性的深入研究的基础上。
事实上,红外光电传感器特性并非如前文所述那样简单(白区高电压,黑线低电压),其电压大小与传感器距离黑色路径标记线的水平距离有定量关系:离黑线越近,电压越低,离黑线越远,则电压越高,(具体的对应关系与光电管型号以及离地高度有关),如图1所示。
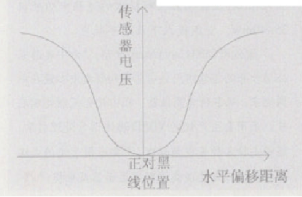
图1 传感器电压与偏移距离关系示意图
因此,只要掌握了传感器电压—偏移距离特性关系,就可以根据传感器电压上的大小确定各传感器与黑色标记线的距离(而不是仅仅粗略判断该传感器是否在线上),进而获得车身相对路径标记线的位置,得到连续分布的路径信息。
连续路径识别算法
算法总流程框图如图2所示,分为光电传感器特性测定、比赛开始前预标定、正式比赛三个步骤。
(1)传感器特性测定
传感器电压—偏离距离曲线的测定是实现连续路径识别的基础,需在软件调试阶段预先完成。以下将以一套实际设计的传感器为实例,说明曲线测定的过程。
传感器组参数如表1所示。
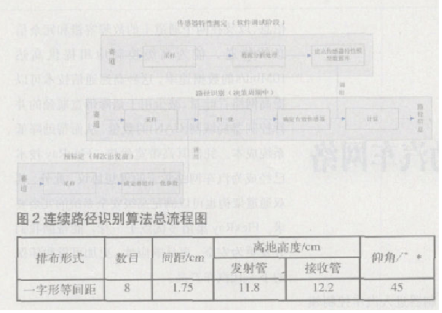
表1 传感器组参数
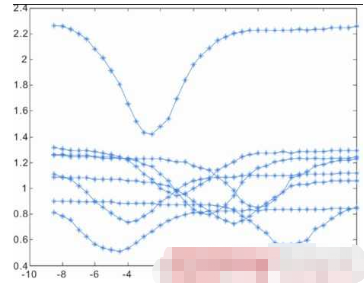
图3 实测传感器电压—偏离距离特性曲线
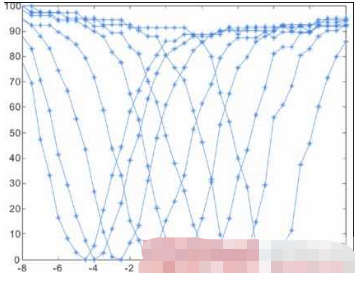
图4 归一化后的传感器电压—偏离距离特性曲线
测定过程中,首先需要选择测试点,即选择与道路标记线远近距离不同的点,如10cm、9cm、8cm……2cm、1cm等;然后在这些点上进行传感器电压采样,得到这些点所对应的传感器接收管电压值;最后将电压值与距离参数一一对应,便可绘制出传感器电压—偏离距离曲线。实测曲线如图3所示。
从曲线中不难看出,由于器件制造工艺的问题,各个光电管的性能特性存在很大差异,特别是电压波动范围相差较大。因此,为了给算法制定统一的标准,给数据处理带来方便,需对各传感器的特性曲线进行归一化处理,具体方法有很多,比如可以把各传感器的电压值都处理成相对该传感器最大电压(白区电压)和最小电压(黑区电压)的变化百分比,以使所有的特性曲线的范围都将在0到100之间。









