
在反相配置框图(图2B)中,输入信号(-XINV)先乘以ZF/(ZF+ZG)因子,然后到达减法模块输入端,命名为XINV,i。在图2A和图2B的两个框图之间,当严格相对于减法模块输入或运放输入观察时,前馈增益和反馈因子完全相同,两种配置的区别仅是相对输入信号观察时输入信号的数学转换。因此两种配置下的开环增益稳定性分析结果也是相同的。
通过使用线性系统处理方法,图2B中的反相配置框图可以映射为图2C。图2C中的框图是对反相配置进行简单数学处理的结果,不过图2B中的子模块更好地对应于实际物理系统的单元。与物理系统有更好的一对一对应关系的模型一般更容易让人理解。图2C是相对于信号源(-XINV)的反相配置的框图表示法,因此公式1.b中所示的前馈增益表达式(AINV)对同相配置来说看起来不同于公式1.a的表达式。
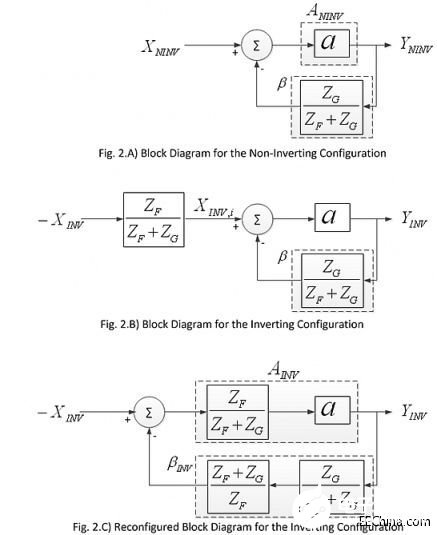
图2A:同相配置框图。
图2B:反相配置框图。
图2C:针对反相配置的重配置框图。
噪声增益:不仅仅针对噪声
为了方便理解,输出噪声(包括偏移量)通常以运放或放大器的输入端为参考。一般来说,给定极性的输出电压完全以运放正输入端为参考会导致输入电压与输出电压有相同的极性,而完全以负输入端为参考会导致相反极性的输入电压。
从非相关噪声模型角度看,噪声电压的符号或相位是不相关的,因此噪声电压的参考是运放的反相还是同相输入端在数学上都是等效的。由于反相输入端有反馈网络,因此输出噪声完全以运放的同相输入端为参考能够很快得出同相放大器的有效且可识别的配置(图1A)。这样,以运放任一输入端为参考的噪声总体增益总是等于反相配置的闭环增益。
因此,即使采用了相对于信号源的反相配置,但以运放输入端为参考的噪声实际上只看到等于(1+ZF/ZG)的同相配置增益,一般称之为噪声增益(NG)。然而,如果噪声源连接的是运放的正输入端,就像同相配置中那样,那么信号增益以及以输入为参考的噪声就完全等于噪声增益。
补偿技术:目的
运放补偿技术有很多种,如“主极点补偿”,“增益补偿”,“超前补偿”,“补偿衰减器”以及“超前-滞后补偿”。任何补偿技术的理想结果都是从纯稳定性角度使多极点系统(高阶系统)接近单极点整体系统,因为单极点反馈系统是无条件稳定的。
大多数补偿技术至少能实现有效的双极点系统状态,其中第二个极点(第一个非主要极点)尽可能远离第一个极点(主要极点),并且通常具有较高的频率拐点,而且拐点相对远,对稳定性的影响可以忽略不计。在一些情况下,通过有意减小主要极点和非主要极点之间的距离来增强带宽,这时通过增益频率响应可以观察到一些高频峰值。









