
行为规划
行为规划有时也被称为决策制定(Decision Maker),主要的任务是按照任务规划的目标和当前的局部情况(其他的车辆和行人的位置和行为,当前的交通规则等),作出下一步无人车应该执行的决策,可以把这一层理解为车辆的副驾驶,他依据目标和当前的交通情况指挥驾驶员是跟车还是超车,是停车等行人通过还是绕过行人等等。
行为规划的一种方法是使用包含大量动作短语的复杂有限状态机(Finite State Machine,FSM)来实现,有限状态机从一个基础状态出发,将根据不同的驾驶场景跳转到不同的动作状态,将动作短语传递给下层的动作规划层,下图是一个简单的有限状态机:
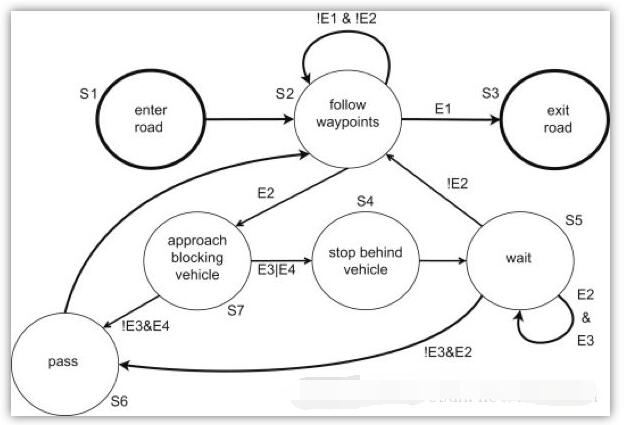
如上图所示,每个状态都是对车辆动作的决策,状态和状态之间存在一定的跳转条件,某些状态可以自循环(比如上图中的循迹状态和等待状态)。虽然是目前无人车上采用的主流行为决策方法,有限状态机仍然存在着很大的局限性:首先,要实现复杂的行为决策,需要人工设计大量的状态;车辆有可能陷入有限状态机没有考虑过的状态;如果有限状态机没有设计死锁保护,车辆甚至可能陷入某种死锁。
动作规划
通过规划一系列的动作以达到某种目的(比如说规避障碍物)的处理过程被称为动作规划。通常来说,考量动作规划算法的性能通常使用两个指标:计算效率(Computational Efficiency)和完整性(Completeness),所谓计算效率,即完成一次动作规划的处理效率,动作规划算法的计算效率在很大程度上取决于配置空间(Configuration Space),如果一个动作规划算法能够在问题有解的情况下在有限时间内返回一个解,并且能够在无解的情况下返回无解,那么我们称该动作规划算法是完整的。
配置空间:一个定义了机器人所有可能配置的集合,它定义了机器人所能够运动的维度,最简单的二维离散问题,那么配置空间就是[x, y],无人车的配置空间可以非常复杂,这取决于所使用的运动规划算法。
在引入了配置空间的概念以后,那么无人车的动作规划就变成了:在给定一个初始配置(Start Configuration),一个目标配置(Goal Configuration)以及若干的约束条件(Constraint)的情况下,在配置空间中找出一系列的动作到达目标配置,这些动作的执行结果就是将无人车从初始配置转移至目标配置,同时满足约束条件。
在无人车这个应用场景中,初始配置通常是无人车的当前状态(当前的位置,速度和角速度等),目标配置则来源于动作规划的上一层——行为规划层,而约束条件则是车辆的运动限制(最大转角幅度,最大加速度等)。









